Maged G. Iskander
Faculty of Business Administration, Economics and Political Science, The British University in Egypt, El-Sherouk City, Cairo, Egypt
Correspondence to: Maged G. Iskander , Faculty of Business Administration, Economics and Political Science, The British University in Egypt, El-Sherouk City, Cairo, Egypt.
| Email: |  |
Copyright © 2015 The Author(s). Published by Scientific & Academic Publishing.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

Abstract
The linear membership function is considered the most common type that is used in fuzzy goal programs. In this paper, the exponential membership function, whether with increasing or with decreasing rate of change, is used. Each of the two types is utilized within a fuzzy goal program. Two main forms of fuzzy goal program are implemented. The first is based on the lexicographical minimization, while the second is based on a preemptive goal hierarchy. A computational comparison between the two forms is carried out on a production planning problem in the textile industry. This problem was in the form of fuzzy linear programming, and it is amended to be in the form of fuzzy goal programming.
Keywords:
Fuzzy Goal Programming, Exponential Membership Function, Lexicographical Minimization, Preemptive Goal Hierarchy
Cite this paper: Maged G. Iskander , Exponential Membership Functions in Fuzzy Goal Programming: A Computational Application to a Production Problem in the Textile Industry, American Journal of Computational and Applied Mathematics , Vol. 5 No. 1, 2015, pp. 1-6. doi: 10.5923/j.ajcam.20150501.01.
1. Introduction
Over the last decades, numerous attempts have been made in the field of Goal Programming (GP) [1-3]. The preemptive priority GP is considered one of the main approaches in modelling GP programs. Hence, each goal is set to a certain predefined priority level, and different solution methods have been introduced to solve the preemptive priority GP problems. Two main criticisms have been made about practicality of the preemptive GP. Firstly, preemptive priorities imply an infinite trade-off between goals placed in different levels, which may lead to high goal achievement of higher goal priority levels and by far too low goal achievement for lower goal priority levels, which leads to unsatisfactory results. Secondly, in a real GP problem it is not easy to define priority levels. This is due to the uncertainty of the relative importance of goals. The first criticism may be avoided by using the weighted GP, where a single objective function of the weighted sum of the deviation variables is to be minimized [4]. However, the decision-maker may find determining goal priority levels in some situations is better than assigning precise weights for the goals. An extensive survey of different GP models was given by Jones and Tamiz [5]. Also, Hannan [6] stated major criticisms and limitations of GP. In many real world problems, the decision-maker may not be certain about the used data. Therefore, fuzzy GP has been introduced to deal with different goal programs under uncertainty and vagueness. An early attempt in fuzzy GP was given by Narasimhan [7] which was followed by contributions from several other researchers [8-13]. Later, Chanas and Kuchta [14] provided a survey of various fuzzy GP models to represent a satisfaction degree of the decision-maker with respect to his/her preference structure. Aköz and Petrovic [15] expressed the preferences of the decision-maker in an imprecise way to overcome the difficulty of setting a crisp preemptive priority structure. In their proposed fuzzy GP model, the goal importance levels are defined and represented by fuzzy relations. Moreover, different types of membership functions can be considered in fuzzy programming. For instance, the logistic membership function has been utilized in fuzzy linear programming to be applied to a production planning problem in the textile industry [16, 17]. In addition, Iskander [18] utilized the exponential membership functions in stochastic fuzzy goal programming. In this paper, two well known forms of fuzzy goal programs are used. The first is based on lexicographical minimization, while the second depends on a preemptive goal hierarchy. A computational comparison between the two forms in the case of exponential membership function, whether with increasing rate of change or with decreasing rate of change, is applied to the production planning problem of Elamvazuthi et al. [17]. In the next section, the formulation of the two fuzzy goal programming models, with the exponential membership functions are given. The computational comparison, which is based on a production planning problem is stated in Section 3. Finally, conclusions are provided in the last section.
2. Fuzzy Goal Programming Models
Assume the following fuzzy goal constraints:  | (1) |
 | (2) |
where xj, j = 1, 2,..., n, are non-negative decision variables, bi, i = 1, 2,..., m, are the required aspiration levels, while aij represents the coefficient of the jth decision variable in the ith fuzzy goal constraint. The symbols  and
and  indicate approximately greater than or equal to and approximately less than or equal to, respectively. Let li and ui be the lower and the upper tolerance limits for the fuzzy goal constraints (1) and (2), respectively. Accordingly, for the set of fuzzy goal constraints (1), the ith exponential membership function with increasing rate of change is presented as
indicate approximately greater than or equal to and approximately less than or equal to, respectively. Let li and ui be the lower and the upper tolerance limits for the fuzzy goal constraints (1) and (2), respectively. Accordingly, for the set of fuzzy goal constraints (1), the ith exponential membership function with increasing rate of change is presented as | (3) |
while with decreasing rate of change, it is stated as | (4) |
On the other hand, for the set of fuzzy goal constraints (2), the ith exponential membership function with increasing rate of change is presented as | (5) |
while with decreasing rate of change, it is stated as | (6) |
These basic forms (linear exponent) of exponential membership functions (3)-(6) have been implemented in the case of stochastic fuzzy goal programming [18]. They have been denoted by either exponential membership functions with increasing or with decreasing rate of change, according to the corresponding basic form. However, in that paper, some of them may not be strictly with increasing or with decreasing rate of change due to the adjustments in the basic forms to fit the stochastic fuzzy problem. Moreover, in that paper and for some of the tested models, the values of the decision variables in the case of increasing rate of change are similar to those in the case of decreasing rate of change. This situation may be satisfactory for the decision-maker.Accordingly, let Ip be the index set of fuzzy goal constraints having priority level p, p = 1, 2,…, P, where P is the number of priority levels, then the lexicographical minimization can be presented as follows:Lexicographically Minimize  subject to:
subject to: | (7) |
where μi is the exponential achievement degree, either with increasing or with decreasing rate of change, for the ith fuzzy goal constraint, while di denotes the corresponding underachievement value. It is obvious that regardless of the non-negativity constraint of di, it must be non-negative. However, incorporating this constraint into the model may help in efficiently reaching the optimal solution.On the other hand, the model with a preemptive goal hierarchy is stated asMaximize  subject to:
subject to: | (8) |
where  is the exponential achievement degree of the ith fuzzy goal constraint having priority level p, p = 1, 2,…, P, while kp is the number of fuzzy goal constraints having priority level p, i.e., the number of elements in set Ip. It is obvious that the objective function has been modified. Instead of maximizing the sum of all membership functions, the average of the membership functions for each priority level is evaluated while the sum of these averages is maximized. The main purpose of this modification is to remove the effect of the number of the membership functions in each priority level. In the two models (7) and (8), a set of system constraints
is the exponential achievement degree of the ith fuzzy goal constraint having priority level p, p = 1, 2,…, P, while kp is the number of fuzzy goal constraints having priority level p, i.e., the number of elements in set Ip. It is obvious that the objective function has been modified. Instead of maximizing the sum of all membership functions, the average of the membership functions for each priority level is evaluated while the sum of these averages is maximized. The main purpose of this modification is to remove the effect of the number of the membership functions in each priority level. In the two models (7) and (8), a set of system constraints  s = 1, 2,…, S, can be incorporated, where
s = 1, 2,…, S, can be incorporated, where  is the sth real-valued function of x (an n-vector of decision variables), and S is the number of system constraints. In the next section, each of the two models is applied to a textile production problem, where a computational comparison between the two models is investigated in the case of increasing and the case of decreasing rate of change.
is the sth real-valued function of x (an n-vector of decision variables), and S is the number of system constraints. In the next section, each of the two models is applied to a textile production problem, where a computational comparison between the two models is investigated in the case of increasing and the case of decreasing rate of change.
3. Computational Study
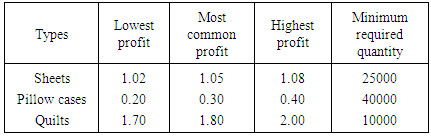
In this section, the textile production planning problem of Elamvazuthi et al. [17] is going to be utilized for a computational comparison between the two models. The structure of the problem takes the form of fuzzy linear programming. Therefore, this problem has been amended to be in the form of fuzzy goal programming. The problem assumes that there are three types of textile products (sheets, pillow cases, and quilts) where the decision variables x1, x2, and x3 denote the quantity produced from sheets, pillow cases, and quilts, respectively. The data of the problem are given in Tables 1 and 2.Table 1. The lowest, most common, and highest profit per unit, as well as the minimum required quantity for each type
 |
| |
|
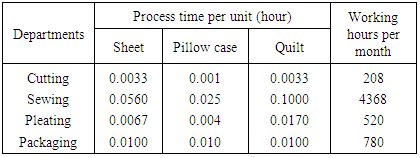
Table 2. The process time per unit, for each type, and the monthly working hours in each department
 |
| |
|
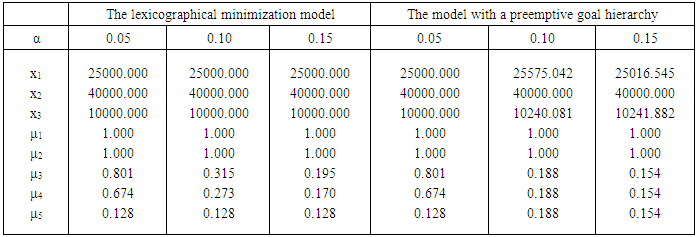
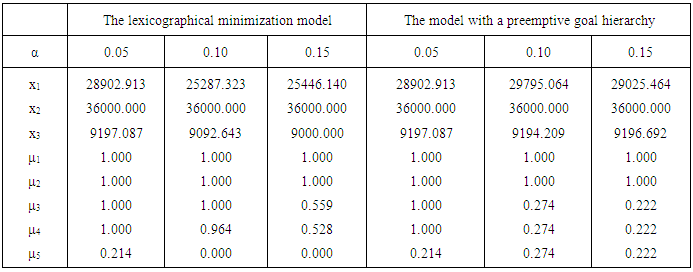
Three system constraints, for the minimum required quantity from each type, are introduced as follows: x1 ≥ 25000, x2 ≥ 40000, x3 ≥ 10000.Then, five fuzzy goals are proposed. The first four represent the process time for each of the four departments, while the fifth stands for the production profit. Therefore, the exponential membership functions of the five fuzzy goals can be stated as(a) The Case of Increasing Rate of Change:ζ1 = (exp{1} – 1)-1 (exp{(208 – 0.0033x1 – 0.001x2 – 0.0033x3) / (208 – 208(1 – α))} – 1),ζ2 = (exp{1} – 1)-1 (exp{(4368 – 0.056x1 – 0.025x2 – 0.1x3) / (4368 – 4368(1 – α))} – 1),ζ3 = (exp{1} – 1)-1 (exp{(520 – 0.0067x1 – 0.004x2 – 0.017x3) / (520 – 520(1 – α))} – 1),ζ4 = (exp{1} – 1)-1 (exp{(780 – 0.01x1 – 0.01x2 – 0.01x3) / (780 – 780(1 – α))} – 1),ζ5 = (exp{1} – 1)-1 (exp{(1.05x1 + 0.3x2 + 1.8x3 – 53718.447) / (66454.369 – 53718.447)} – 1).(b) The Case of Decreasing Rate of Change:ζ1 = (1 – exp{-1})-1 (1 – exp{(0.0033x1 + 0.001x2 + 0.0033x3 – 208) / (208 – 208(1 – α))}),ζ2 = (1 – exp{-1})-1 (1 – exp{(0.056x1 + 0.025x2 + 0.1x3 – 4368) / (4368 – 4368(1 – α))}),ζ3 = (1 – exp{-1})-1 (1 – exp{(0.0067x1 + 0.004x2 + 0.017x3 – 520) / (520 – 520(1 – α))}),ζ4 = (1 – exp{-1})-1 (1 – exp{(0.01x1 + 0.01x2 + 0.01x3 – 780) / (780 – 780(1 – α))}),ζ5 = (1 – exp{-1})-1 (1 – exp{(53718.447 – 1.05x1 – 0.3x2 – 1.8x3) / (66454.369 – 53718.447)}).The linear programming model of the given textile problem [16] is solved in two cases. In the first case, the lowest profit values for the three types are the used coefficients in the profit objective function that is required to be maximized. In the second case, the highest profit values are used. The value of the profit objective function in the two cases is 53718.447 and 66454.369, respectively. Hence, 66454.369 is considered the required aspiration level, while 53718.447 is the lower tolerance limit for the fifth fuzzy goal. For each of the first four fuzzy goals, the working hours per month represent the upper tolerance limit, while the required aspiration level is the upper tolerance limit weighted by (1 – α). Thus, α is defined to be the intolerance measure, α ∈ (0, 1). Two priority levels are presumed. The first is assigned to the process time in each department (i.e., the first four fuzzy goals) while the second is assigned to the production profit (i.e., the fifth fuzzy goal). The CONOPT solver embedded in the General Algebraic Modeling System (GAMS win32 23.8.2) package is utilized in this computational study. The results of the two models, in the case of increasing and the case of decreasing rate of change, as well as when α = 0.05, 0.1, and 0.15, are given in Tables 3 and 4.Table 3. The case of increasing rate of change
 |
| |
|
Table 4. The case of decreasing rate of change
 |
| |
|
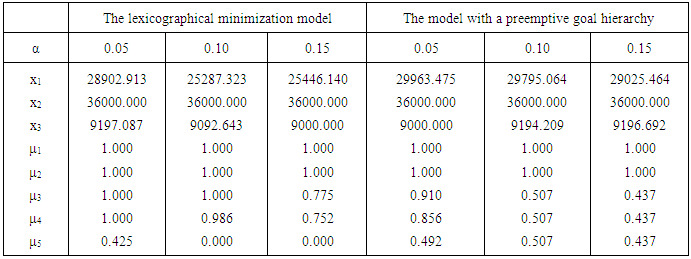
It is obvious that the values of the decision variables of the lexicographical minimization model have not been changed whether in the case of increasing or the case of decreasing rate of change, and for different values of α. This is mainly due to the system constraints which also prevent some of the goals having the first priority level to be achieved, since μ3 and μ4 are less than one, i.e., the third and the fourth goals are not fully achieved. This indicates that this model is less sensitive to the change in the results than the model with a preemptive goal hierarchy. On the other hand, it can be realized that whether in the case of increasing or the case of decreasing rate of change the total value of the membership functions of the five goals (the sum of the achievement degrees of all the goals) is higher in the case of the lexicographical minimization model than that in the case of the model with a preemptive goal hierarchy. This is for each value of α, except when α = 0.05 in the case of increasing rate of change, since the results of the two models are exactly the same. Moreover, the situation when α = 0.2 was investigated. It has been found that, whether in the case of increasing rate of change or the case of decreasing rate of change, there is no feasible solution for the model with a preemptive goal hierarchy, while there is a solution for the lexicographical minimization model. Afterward, the model with a preemptive goal hierarchy has been solved using the unmodified objective function, i.e., when the sum of all membership functions is required to be maximized. The results were similar to the results of the lexicographical minimization model that are given in Tables 3 and 4. Hence, the achievement value of the fifth fuzzy goal (which has the second priority level) is less than or equal to its corresponding value when the amended objective function is used, since the amended form removes the effect of the number of fuzzy goals having the first priority level. Moreover, the two models have been solved with an opposite priority structure, i.e., the fifth fuzzy goal has the first priority while the others have the second priority. The results of the lexicographical minimization model are x1 = 27766.990, x2 = 40000, x3 = 10233.010, μ1 = 1, μ2 = 1, μ3 = 0, and μ4 = 0 for the three values of α, and whether in the case of increasing or the case of decreasing rate of change. Only, μ5 = 0.340 in the case of increasing rate of change, while μ5 = 0.583 in the case of decreasing rate of change. Conversely, there is no solution for the model with a preemptive goal hierarchy in all the cases.Since the unchanged values of the decision variables for the lexicographical minimization model are mainly due to the system constraints, another computational investigation has been conducted by relaxing the system constraints. Accordingly, it is assumed that the minimum required quantity from each type is reduced by 10%. Thus, the three system constraints become x1 ≥ 22500, x2 ≥ 36000, x3 ≥ 9000.The two original models were solved according to the amended system constraints. The results are presented in Tables 5 and 6.Table 5. The case of increasing rate of change, according to the amended system constraints
 |
| |
|
Table 6. The case of decreasing rate of change, according to the amended system constraints
 |
| |
|
It is obvious that relaxing the system constraints leads to some interesting indications. First, it might be preferable to start with the lexicographical minimization model, in order to avoid having a solution that is not optimal, which may exist if the model with a preemptive goal hierarchy is used. For instance, in Table 5 and when α = 0.1, according to the objective function of the model with a preemptive goal hierarchy, the solution of the lexicographical minimization model is better than that of the model with a preemptive goal hierarchy. Nevertheless, the GAMS/CONOPT solver could not find this feasible better solution for the model with a preemptive goal hierarchy. Second, the case of getting unchanged values of the decision variables for the lexicographical minimization model has been resolved. On the other hand, the model with a preemptive goal hierarchy may be recommended to avoid getting zero for the membership function of the fifth goal. It should be noted that in the two models, a more general case can be introduced by using different intolerance measures for the four fuzzy goals, instead of using the same one for all of them. In this situation, an interactive approach may be implemented. This case can be investigated in a further study.
4. Conclusions
In this paper, a computational comparison between the lexicographical minimization model and the model with a preemptive goal hierarchy has been applied to a fuzzy textile production planning problem, where the membership functions of the fuzzy goals are considered exponential with either increasing or decreasing rate of change. It can be concluded that it is preferable to use the lexicographical minimization model, if the decision-maker is not sure about the tolerance limits of the fuzzy data, in order to minimize the sensitivity of the change in results due to the change in data. Also, the lexicographical minimization model is recommended when the achievement degrees of the goals with low priority levels are most likely to be relatively high. This is to avoid having infeasible solution, which may exist when the model with a preemptive goal hierarchy is used. This recommendation is applicable whether in the case of increasing or the case of decreasing rate of change. On the other hand, if the decision-maker is seeking to get different sets of results based on different tolerance limits that reflect alternative production scenarios, then the model with a preemptive goal hierarchy can be preferable.Finally, whether in the case of increasing or the case of decreasing rate of change, if an optimal solution exists for each of the two models, the trade-off between not getting zero for any membership function and achieving large values for the membership functions with high priority levels is a main criterion for choosing between the two models.
References
| [1] | Ignizio, J.P. 1976. Goal programming and extensions, Lexington Books, Lexington, MA. |
| [2] | Steuer, R.E. 1986. Multiple Criteria Optimization: Theory, Computation, and Application, John Wiley & Sons, Singapore. |
| [3] | Romero, C. 2004. A general structure of achievement function for a goal programming model. European Journal of Operational Research 153: 675–686. |
| [4] | Gass, S.I. 1987. The setting of weights in linear goal-programming problems. Computers & Operations Research 14: 227–229. |
| [5] | Jones, D.F. and Tamiz, M. 2002. Goal programming in the period 1990–2000, In: Ehrgott, M., Gandibleux, X. (Eds.): Multiple Criteria Optimization, State of the Art Annotated Bibliographic Surveys, 129–170, Kluwer Academic Publishers, USA. |
| [6] | Hannan, E.L. 1985. An assessment of some criticisms of goal programming. Computers & Operations Research 12: 525–541. |
| [7] | Narasimhan, R. 1980. Goal programming in a fuzzy environment. Decision Sciences 11: 325–336. |
| [8] | Hannan, E.L. 1981. On fuzzy goal programming. Decision Sciences 12: 522–531. |
| [9] | Ignizio, J.P. 1982. On the (re)discovery of fuzzy goal programming. Decision Sciences 13: 331–336. |
| [10] | Tiwari, R.N., Dharmar, S. and Rao, J.R. 1987. Fuzzy goal programming – An additive model. Fuzzy Sets and Systems 24: 27–34. |
| [11] | Mohandas, S.U., Phelps, T.A. and Ragsdell, K.M. 1990. Structural optimization using a fuzzy goal programming approach. Computers & Structures 37: 1–8. |
| [12] | Wang, H.F. and Fu, C.C. 1997. A generalization of fuzzy goal programming with preemptive structure. Computers & Operations Research 24: 819–828. |
| [13] | Chen, L.H. and Tsai, F.C. 2001. Fuzzy goal programming with different importance and priorities. European Journal of Operational Research 133: 548–556. |
| [14] | Chanas, S. and Kuchta, D. 2002. Fuzzy goal programming – one notion, many meanings. Control and Cybernetics 31: 871–890. |
| [15] | Aköz, O. and Petrovic, D. 2007. A Fuzzy goal programming method with imprecise goal hierarchy. European Journal of Operational Research 181: 1427–1433. |
| [16] | Sengupta, A., Vasant, P. and Andeeski, C.J. 2008. Fuzzy Optimization with Robust Logistic Membership Function: A Case Study In For Home Textile Industry. Proceedings of the 17th World Congress, The International Federation of Automatic Control, Seoul, Korea, July 6–11. |
| [17] | Elamvazuthi, I., Ganesan, T., Vasant, P. and Webb, J.F. 2009. Application of a fuzzy programming technique to production planning in the textile industry. International Journal of Computer Science and Information Security 6: 238–243. |
| [18] | Iskander, M.G. 2006. Exponential membership function in stochastic fuzzy goal programming. Applied Mathematics and Computation 173: 782–791. |

 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTML