Ajie I. J.1, Ikhile M. N. O.2, Onumanyi P.1
1National Mathematical Centre, Abuja, Nigeria
2Department of Mathematics, University of Benin, Benin City, Nigeria
Correspondence to: Ajie I. J., National Mathematical Centre, Abuja, Nigeria.
| Email: |  |
Copyright © 2014 Scientific & Academic Publishing. All Rights Reserved.
Abstract
A family of k-stepBackward Differentiation Formulas (BDFs)and the additional methods required to form blocks that possess L(α)-stability properties are derived by imposing order k on the general formula of continuous BDF. This leads to faster derivation of the coefficients compare to collocation and integrand approximation methods. Linear stability analysis of the resultant blocks show that they are L(α)-stable. Numerical examples are presented to show the efficacy of the methods.
Keywords:
Backward Differentiation Formulas (BDFs), One-Block Implicit Backward Euler Type, L(α)-stable, A(α)-stable, Region of Absolute Stability (RAS)
Cite this paper: Ajie I. J., Ikhile M. N. O., Onumanyi P., A Family of One-Block Implicit Multistep Backward Euler Type Methods, American Journal of Computational and Applied Mathematics , Vol. 4 No. 2, 2014, pp. 51-59. doi: 10.5923/j.ajcam.20140402.03.
1. Introduction
The popular one-step Backward Euler Method (BEM) is given by the formula | (1.1) |
(1.1) is known to possess a correct behaviour when the stiffness ratio is severe in a stiff system of initial value problem of ordinary differential equations given in the form | (1.2) |
 | (1.3) |
Our main concern in this paper is to propose a new family of One-Block Implicit Backward Euler Type method of the form  | (1.4) |
where

 and
and are of order k by k.We require that the methods belonging to (1.4) converge efficiently like (1.1) but with better accuracy of order k,
are of order k by k.We require that the methods belonging to (1.4) converge efficiently like (1.1) but with better accuracy of order k,  .
.
2. Derivation of Formulae (1.4)
Consider the general linear multistep method given by | (2.1) |
where the step number  is a variable step length, αk and βk are both not zero. Following Lambert (1973) by making use of Taylor expansion of(2.1) and the associated linear operator L defined as
is a variable step length, αk and βk are both not zero. Following Lambert (1973) by making use of Taylor expansion of(2.1) and the associated linear operator L defined as | (2.2) |
where y(t) is an arbitrary function which is continuously differentiable on the interval [a, b] and expanding the test function y(t+rh) and its derivative y'(t+rh) about t gives (2.3) if we collect like terms, | (2.3) |
where and
and | (2.4) |
For backward differentiation formulas (BDFs), we put in (2.1)  and
and  This gives
This gives | (2.5) |
If continuous coefficients of (2.5) are assumed, we have | (2.6) |
where the coefficients  , in formula (2.6), are evaluated at
, in formula (2.6), are evaluated at  by imposing order k on it, that is
by imposing order k on it, that is  . This leads to the following k by k vandermonde matrix (see Brugnano and Trigiante (1998)).
. This leads to the following k by k vandermonde matrix (see Brugnano and Trigiante (1998)). | (2.7) |
Equation (2.7) is used to derive k-step BDFs at point , additional methods are obtained by evaluating the derivative function at the points
, additional methods are obtained by evaluating the derivative function at the points . This is done by computing the vandermonde matrix at
. This is done by computing the vandermonde matrix at  . The k-step Backward Differentiation Formula and the additional methods are then combined to obtain a self-starting block that can simultaneously generate the solutions
. The k-step Backward Differentiation Formula and the additional methods are then combined to obtain a self-starting block that can simultaneously generate the solutions  of (1.2)-(1.3) at points
of (1.2)-(1.3) at points  . We then express the block methods for a fixed value of k like the one-step Backward Euler Method (BEM) of the form (1.4) where
. We then express the block methods for a fixed value of k like the one-step Backward Euler Method (BEM) of the form (1.4) where  for the first six members are as given in this work. The computer finds it easier to compute the inverse of the vandermonde matrix with real constants in (2.7) than the matrix inverse
for the first six members are as given in this work. The computer finds it easier to compute the inverse of the vandermonde matrix with real constants in (2.7) than the matrix inverse  associated with the direct construction of interpolation and collocation matrix
associated with the direct construction of interpolation and collocation matrix | (2.8) |
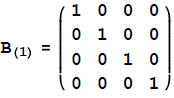
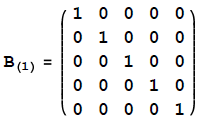
such that CD = Ikxk identity matrix. The columns of C contains the constant coefficients of the continuous multistep method. (see Onumanyi et al. (2001), Akinfenwa et al (2011)).The first six members of the family expressed in form (1.4) have the following as 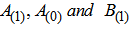 Case k = 1
Case k = 1 Case k = 2
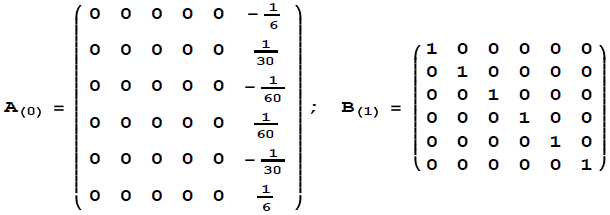
Case k = 2 Case k = 3
Case k = 3 Case k = 4
Case k = 4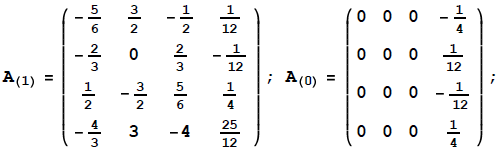
 Case k = 5
Case k = 5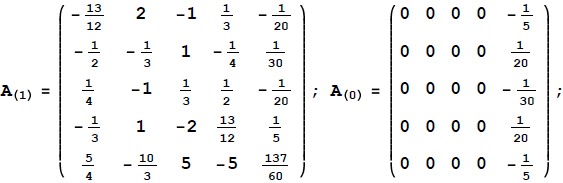
 Case k = 6
Case k = 6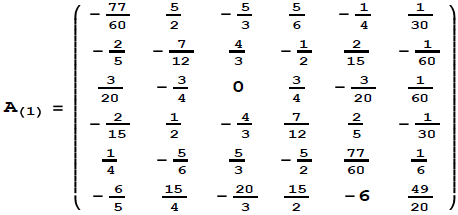
3. Linear Stability Analysis of 1.4
Applying (1.4) to the test equation | (3.1) |
gives | (3.2) |
where | (3.3) |
From (3.3), we obtain the stability function R(z) which is a rational function of real coefficients given by  | (3.4) |
where I is a  identity matrix. The stability domain S of a one-step block method is
identity matrix. The stability domain S of a one-step block method is  | (3.5) |
From the analysis given we easily obtain as follows the rational functions R(z) for  which satisfies (3.5).
which satisfies (3.5). | (3.6) |
Case k = 1 Case k = 2
Case k = 2 Case k = 3
Case k = 3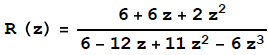 Case k = 4
Case k = 4 Case k = 5
Case k = 5 Case k = 6
Case k = 6 Case k = 7
Case k = 7 Case k =8
Case k =8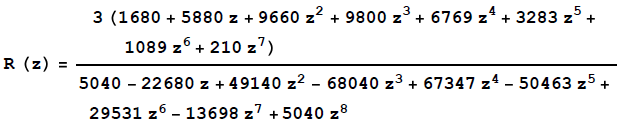 Case k = 9
Case k = 9 Case k = 10
Case k = 10 Case k = 11
Case k = 11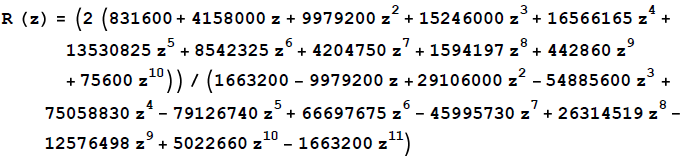 The characteristics polynomial of the method is
The characteristics polynomial of the method is  The methods are absolutely stable in the region where
The methods are absolutely stable in the region where  . Using the boundary locus method, the regions of instabilities are as given below
. Using the boundary locus method, the regions of instabilities are as given below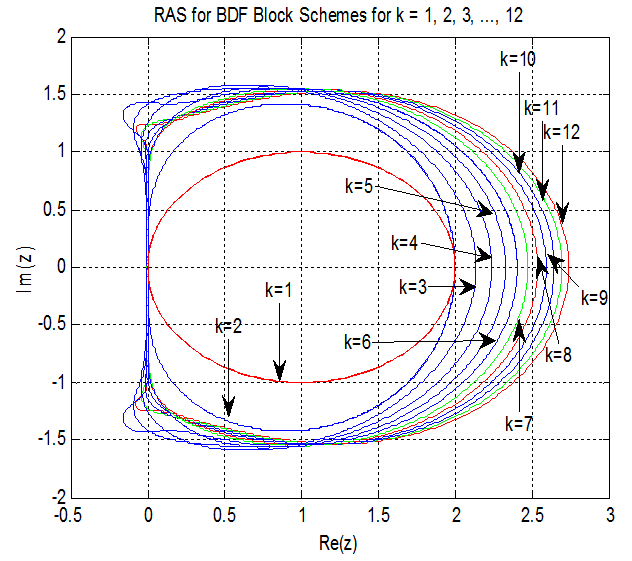 | Figure 1. Boundary loci of the proposed blocked methods of order k, k = 1, 2, 3, …, 12 |
 Let k denote the step number, p = k the order and
Let k denote the step number, p = k the order and 
 The methods are
The methods are  since its region of absolute stability (RAS) contains an infinite wedge
since its region of absolute stability (RAS) contains an infinite wedge and
and  since
since  (see Chartier (1994))
(see Chartier (1994))
4. Numerical Examples
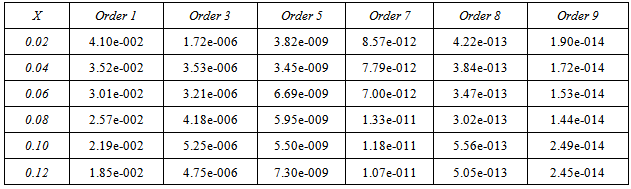
Example 4.1The test equation  , with solution
, with solution  is solved with h = 0.01 and
is solved with h = 0.01 and  using different order of the proposed methods. The results of the absolute errors are displayed in table 1 below
using different order of the proposed methods. The results of the absolute errors are displayed in table 1 belowTable 1. Absolute errors in example 4.1 when solved with different order of the proposed methods
 |
| |
|
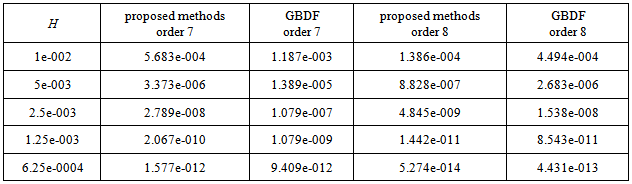
Example 4.2Consider the following linear constant coefficient initial value problem taken from Lambert (1973), Its theoretical solution is
Its theoretical solution is  The above problem was solved by Brugnano and Trigiante (1998) using Generalized Backward Differentiation Formula (GBDF) of different order. GBDF is a boundary value method (BVM). We report here in table 2 the maximum absolute error obtained using our proposed methods and GBDF of the same order (7 and 8).
The above problem was solved by Brugnano and Trigiante (1998) using Generalized Backward Differentiation Formula (GBDF) of different order. GBDF is a boundary value method (BVM). We report here in table 2 the maximum absolute error obtained using our proposed methods and GBDF of the same order (7 and 8). Table 2. Absolute errors in example 4.2 using the two methods
 |
| |
|
Example 4.3 The Vander Pol problem is one of the problems used to demonstrate the ability of a method to solve stiff nonlinear problems. The above Vander Pol is solved for
The Vander Pol problem is one of the problems used to demonstrate the ability of a method to solve stiff nonlinear problems. The above Vander Pol is solved for  , using order 8 of our method and step size h = 0.005. The phase diagram of the solution computed using ode 15s is displayed in figure 1 while the one by our proposed method is in figure 2 below:
, using order 8 of our method and step size h = 0.005. The phase diagram of the solution computed using ode 15s is displayed in figure 1 while the one by our proposed method is in figure 2 below: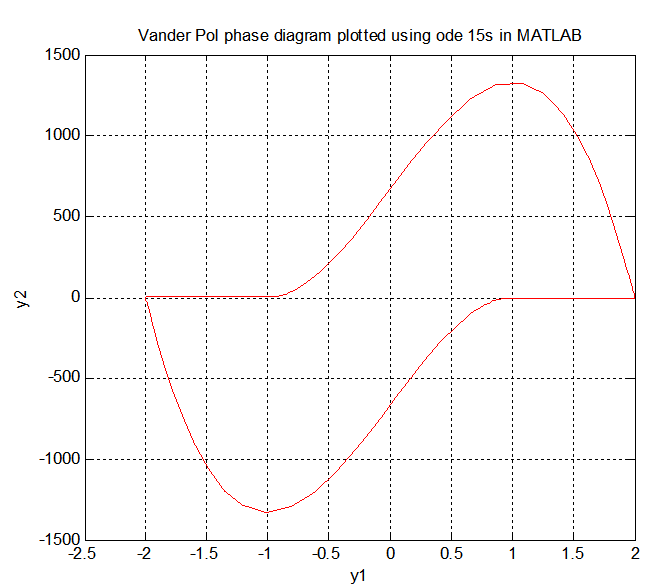 | Figure 2. Solution of problem 4.3 in phase plane, computed with order 8 of the proposed method ( ) ) |
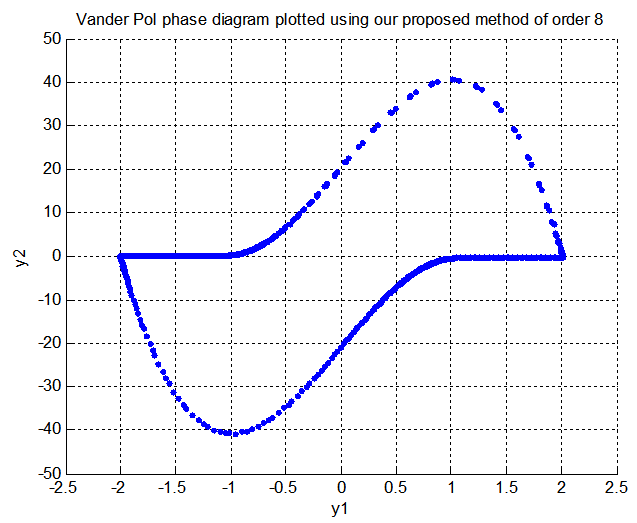 | Figure 3. Solution of problem 4.3 in phase plane, computed with order 8 of the proposed method ( and h = 0.005) and h = 0.005) |
5. Conclusions
A family of efficient high order L(α)-Stable block methods for solving stiff ordinary differential equations has been proposed and implemented for k = 1, 2, …, 12 as self-starting methods. The methods which are derived from Backward Differentiation Formula is based on order definition. It circumvented the collocation and integrand approximation approaches which have been widely used in the past by many authors. The numerical experiments show that our methods have high order and can compete favourably with existing ones.
References
| [1] | Ajie, I. J., Onumanyi P., and Ikhile, M. N. O., (2011) Journal of The Nigerian Mathematical Society, vol. 13, p. 6-9. |
| [2] | Akinfenwa, O., Yao N. and Jator, S., (2011) ‘Implicit two step continuous hybrid block methods with four Off-Steps point for solving stiff ordinary differential equation.’ In Proceedings of the International Conference on Computational and Applied Mathematics, Bangkok, Thailand, p. 425-428. |
| [3] | Akinfenwa, O., Yao, N. and Jator, S., (2011) “A Self-Starting Block Adams Mathods for Solving Stiff Ordinary Differential Equation,” in Computational Science and Engineering (CSE), 2011 IEEE 14th International Conference, p. 127-136. |
| [4] | Brugnano, L. and Trigiante, D. (1998), Solving differential problems by multistep initial and boundary value methods. Published by Gordon and Beach Science Publisherspp 136-139. |
| [5] | Charter, P. (1994) ‘L-stable parallel one-block methods for Ordinary differential equations’ SIAM J. numer. anal. Vol. 31, No. 2, pp. 552-571. |
| [6] | Fatunla, S. O., (1991) “Block Method for Second Order IVPs” J. Compt. Maths, vol. 41, p. 55-63. |
| [7] | Lambert, J. D., (1973) Computational Methods in Ordinary Differential Equations. New York: John Wiley, Sons, Inc. pp 228-230. |
| [8] | Onumanyi, P., Sirisena, W.U. and Chollom, J. P., (2001) Continuous hybrid methods through multistep collocation. Abacus, Journal Mathematical Association of Nigeriapp 58-64. |
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTML