| [1] | Rvachev V. L. R–function theory and some of its appliances. Kiev: Naukova dumka, 1987. 259 p. |
| [2] | Obraztsov I.F.and others. Method of final elements for flying objects’ construction mechanics tasks. M.: Visshaya shkola, 1985. 392 p. |
| [3] | Kontorovich L.V., Krilov V.I. Approximate methods of higher analysis. M.: Gosizd. Phis−mat.lit., 1962. 708 p. |
| [4] | Stoyan Yu.G. i dr. R–function theory and actual problems of applied mathematics. Kiev: Naukova dumka, 1986. 264 p. |
| [5] | Anorova Sh.A. Algorithmization of methods of R − function and successive approximations in problems of constraint torsion. Proc.of VIII Russian Counsel on Theor. And Appl. Mechanics. Perm, 2001. P. 45. |
| [6] | Anorova Sh.A. Study of stress − strain state of prismatic elements of structures of arbitrary section in problems of constraint torsion. Proc. Of Republican conference “Modern problems of algorithmization and programming”. Tashkent, 2001. P. 85. |
| [7] | Anorova Sh. A., Kurmanbaev B., Nazirov Sh.A. Modeling in problems of constraint torsion of prismatic bodies of arbitrary section. Uzbek Journal “Problems of informatics and energy”. 2001. №1. P. 36-40. |
| [8] | Nazirov Sh. A., Anorova Sh. A. Program complex of design of spatial − loaded rods. Proc. Of Republican conference “Problems of algorithmic programming”. Tashkent, 2000. P. 76-77. |
| [9] | Anorova Sh.A. Study of stress − strain state of prismatic bodies of arbitrary section with different form of cavity on the basis of computational experiment. Proc. of Republican conference “Mathematical Simulation and Computational experiment”. Tashkent, 2002. P. 22. |
| [10] | Nazirov Sh.A., Anorova Sh.A. Modeling of stress − strain state of prismatic bodies of arbitrary section in problems of constraint torsion. Uzbek Journal «Problems of informatics and energy». 2003. №3. P.22-25. |
| [11] | Kobulov V.K., Anorova Sh.A. Comparison of the effect of cavity on stress state of prismatic bodies of arbitrary section in problems of constraint torsion. «Reports of Academy of Sciences of the Republic of Uzbekistan” journal, Tashkent, Fan, 2003, No 3, P.7-10. |
| [12] | Anorova Sh A., Kurmanbaev B. Study of the influence of cavity on stress state of prismatic bodies in problems of constraint torsion. Proc. Of International conference «Modern problems of mathematical physics and information technology». Tashkent, 2005, Volume №2, P. 120-124. |
| [13] | Anorova Sh.A., Kurmanbaev B., Nazirov Sh.A. Technology of elastic design of prismatic bodies of arbitrary section. Proc. Of Republican Conference «Modern problems of mathematical modeling». Part 2. Nukus, 2005. P. 92-95. |
| [14] | Nazirov Sh.A., Nuraliev F.M. Algorithmization of the solution of problems of a magnitouprugost of thin bodies by a method of R−functions. Mechanical engineering problems. 2011, t. 14, No. 1. P. 61-68. |
| [15] | Nazirov Sh.A. Differential trains of one-dimensional interval and-place functions, Messenger of TUIT, No. 4/2011. P. 28-33. |
| [16] | Nazirov Sh.A. Multidimensional intervalno-unit R-function//Vopr. vichisl. prikl. matematiki. Tashkent, 2011. No 126. P. 29-59. |
| [17] | Nazirov Sh.A., Eshkorayeva N.G. Mathematical modeling of processes of deformation of flexible viscoelastic plates with a difficult form. Messenger HAG. 2011, No. 2. P. 53-61. |
| [18] | Nazirov Sh.A, Eshkarayeva N. Mathematical modeling of deformation of flexible viscoelastic plates with complex form. Proceedings of the 3rd International Conference on Nonlinear Dynami. ND-KhPI 2010, September 21-24, 2010, Kharkov, Ukraine. P. 375-376. |
| [19] | Nazirov Sh.A. The R-method of functions in problems of mathematical programming. Vopr. vichisl. prikl. matematiki. - Tashkent, 2011. No 126. P. 79-89. |
| [20] | Nazirov Sh.A., Soatov H.S. The mathematical formulation of a problem of mathematical programming on the basis of a method of R-functions. Materials of republican scientific and technical conference «Development of integration of a science education and to production on the basis of information and communication technologies» Karshi, 2012 г. P. 15-18. |
| [21] | Maksimenko-Sheyko K.V. R-functions in mathematical modeling of geometrical objects and physical fields. Kharkov, IPM NAS of Ukraine, 2009. P. 50-56. |
| [22] | Nazirov Sh.A., Nuraliev F.M. Mathematical modeling of processes of electro-magnetic fields’ affection thin conducting plates by complex form. American Journal of Computational and Applied Mathematics. 2012, 2 (1): P. 30-33. |
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-Text HTML
Full-Text HTML
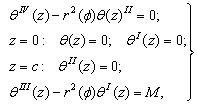
 − is a torsion angle;
− is a torsion angle;  I − relative angle of twisting; φ(x,y) − torsion function; r2(φ)=(Ip+2Id+Ik)/iφφ; M=Mкр/ Iφφ;
I − relative angle of twisting; φ(x,y) − torsion function; r2(φ)=(Ip+2Id+Ik)/iφφ; M=Mкр/ Iφφ;

 In the second step r2(φ) is calculated and is solved by (1):
In the second step r2(φ) is calculated and is solved by (1):

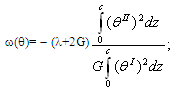
 .Then ω(θ) is calculated and is solved by (2):
.Then ω(θ) is calculated and is solved by (2):
 Then the condition
Then the condition  is checked in a given points х and у. If the condition is satisfied, the components of displacement are calculated:
is checked in a given points х and у. If the condition is satisfied, the components of displacement are calculated: 


 =f1⊥0f2 − boundary form;
=f1⊥0f2 − boundary form; 
 − conjunction.Cij − are unknown coefficients to be defined; Xi(x), Yj(y) − full system of basic polynomes (order ones, trigonometric, Chebyshev’s or other).
− conjunction.Cij − are unknown coefficients to be defined; Xi(x), Yj(y) − full system of basic polynomes (order ones, trigonometric, Chebyshev’s or other). , ,where
, ,where  In this case the following boundary conditions are added to (2):
In this case the following boundary conditions are added to (2):
 .Here numeric convergence of torsion function and its derivatives are studied; results are given in Table 3 for different number of terms in (13), where good agreement and convergence are observed for different sections of prismatic body with rectangular cavity.
.Here numeric convergence of torsion function and its derivatives are studied; results are given in Table 3 for different number of terms in (13), where good agreement and convergence are observed for different sections of prismatic body with rectangular cavity.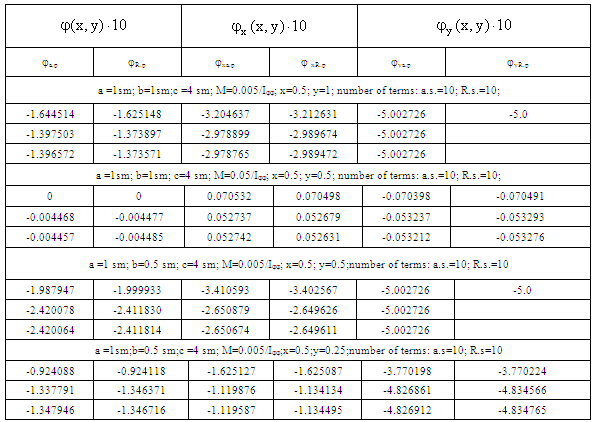
 ); r2=0.2 (
); r2=0.2 ( ). In this case an equation of boundary will have the following form:
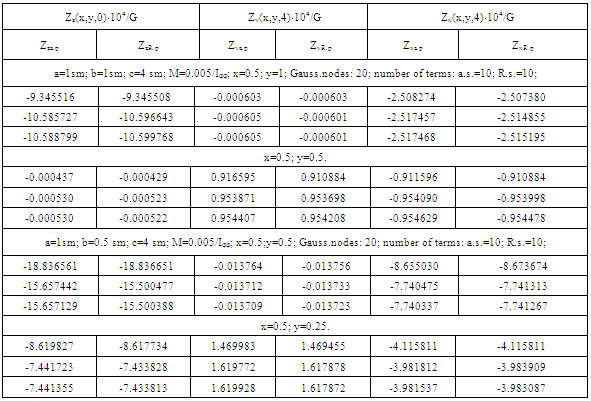
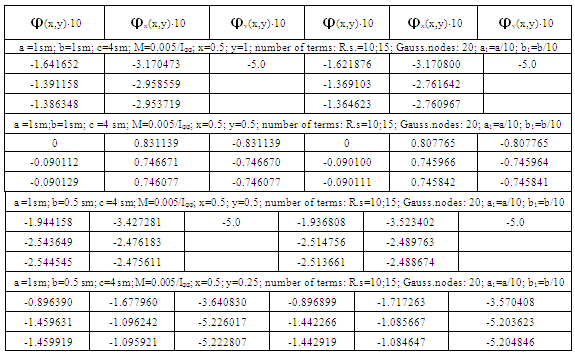
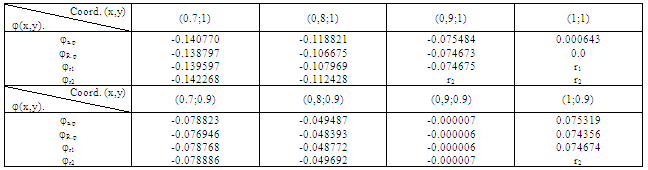
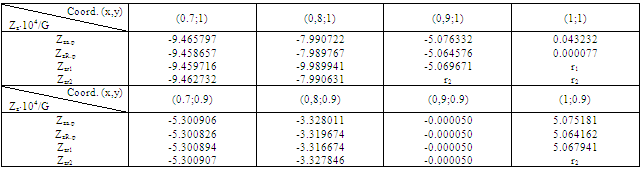
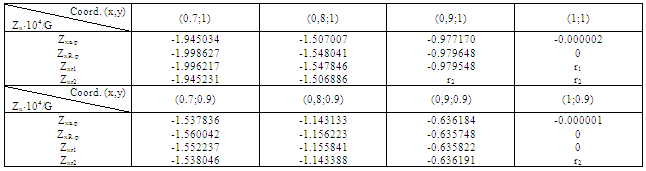
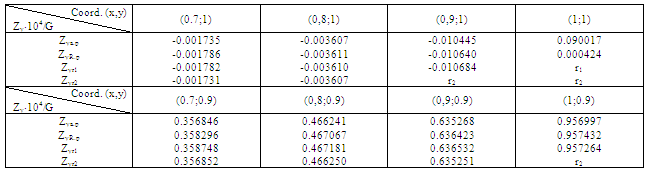
). In this case an equation of boundary will have the following form:  i=1,2,3. Results of design are given in Table 5.As seen from the Table near the angle the values of torsion function coincide in one figure, so results obtained earlier are correct. If the radius is less and the number of terms in the structure of solution of R − function is greater, the results will be better.The values of components of tensor of stresses are given below (Tables 6, 7, 8):
i=1,2,3. Results of design are given in Table 5.As seen from the Table near the angle the values of torsion function coincide in one figure, so results obtained earlier are correct. If the radius is less and the number of terms in the structure of solution of R − function is greater, the results will be better.The values of components of tensor of stresses are given below (Tables 6, 7, 8):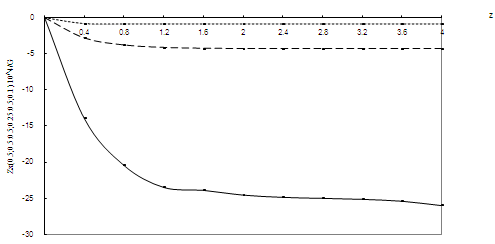
 ); r2=0.05≈(
); r2=0.05≈( ); r3=0.1≈(
); r3=0.1≈( ); r4=0.2≈(
); r4=0.2≈( ); r1(2)=0.003≈(
); r1(2)=0.003≈( ); r2(2)=0.005≈(
); r2(2)=0.005≈( ); r3(2)=0.001≈(
); r3(2)=0.001≈( )In this case an equation of boundary is determined by the following way:
)In this case an equation of boundary is determined by the following way:
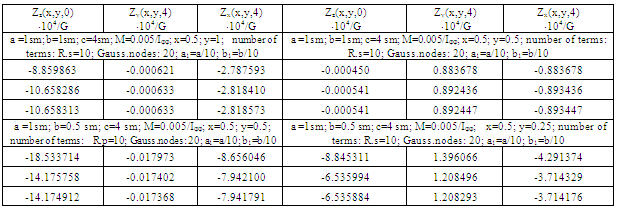
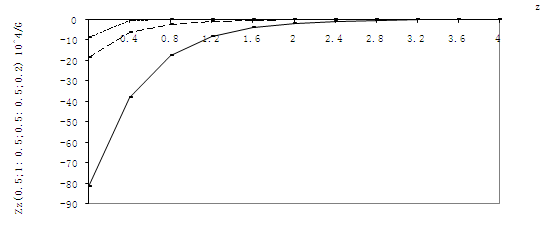
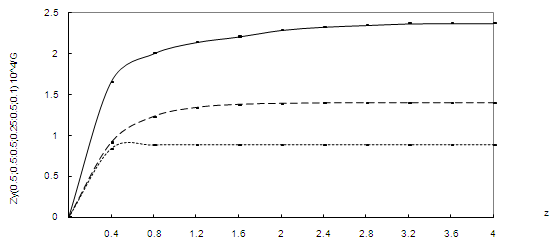
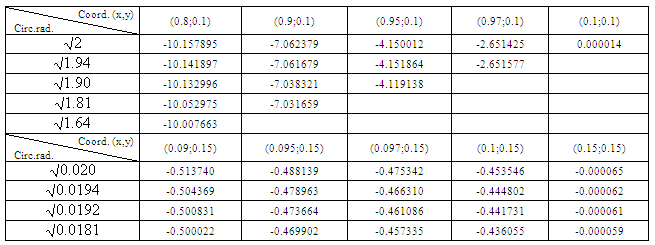
 To study the effect of external and internal angle points on the behavior of stress state of prismatic bodies with arbitrary forms of cavity the body with rounded angles with different radiuses of external and internal quadrate was considered. Results of study of stresses Zz•104/G are given in Table 9 with initial data obtained earlier.As seen from the Table rounded character of external angle effects less than rounded character of internal angle, that is cavity.
To study the effect of external and internal angle points on the behavior of stress state of prismatic bodies with arbitrary forms of cavity the body with rounded angles with different radiuses of external and internal quadrate was considered. Results of study of stresses Zz•104/G are given in Table 9 with initial data obtained earlier.As seen from the Table rounded character of external angle effects less than rounded character of internal angle, that is cavity.