-
Paper Information
- Next Paper
- Previous Paper
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
American Journal of Computational and Applied Mathematics
p-ISSN: 2165-8935 e-ISSN: 2165-8943
2011; 1(2): 89-93
doi: 10.5923/j.ajcam.20110102.17
Piecewise Constant Control Set Systems
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-Text HTML
Full-Text HTMLAndrej V. Plotnikov 1, 2, Anastasiya V. Arsirii 2
1Department Applied Mathematics, Odessa State Academy Civil Engineering and Architecture, Odessa, 65029, Ukraine
2Department Optimal Control, Odessa National University, Odessa, 65026, Ukraine
Correspondence to: Andrej V. Plotnikov , Department Applied Mathematics, Odessa State Academy Civil Engineering and Architecture, Odessa, 65029, Ukraine.
| Email: |  |
Copyright © 2012 Scientific & Academic Publishing. All Rights Reserved.
In this article we prove that for any measurable admissible control and for any there exists piecewise constant admissible control such that for set solutions of control set system are -neighbouring.
Keywords: Set Differential Equation, Control System, Piecewise Constant Control
Cite this paper: Andrej V. Plotnikov , Anastasiya V. Arsirii , "Piecewise Constant Control Set Systems", American Journal of Computational and Applied Mathematics , Vol. 1 No. 2, 2011, pp. 89-93. doi: 10.5923/j.ajcam.20110102.17.
Article Outline
1. Introduction
- In recent years the development of the calculus in metric spaces has attracted some attention[1-7]. Earlier, F.S. de Blasi, F. Iervolino[8] started the investigation of set differential equations (SDEs) in semilinear metric spaces. This has now evolved into the theory of SDEs as an independent discipline: properties of solutions[1-3,5,36], the impulse equations[1,2,37], control systems[38-41] and asymptotic methods[1-3,42-46]. On the other hand, SDEs are useful in other areas of mathematics. For example, SDEs are used, as an auxiliary tool, to prove existence results for differential inclusions[1,26,31,35]. Also, one can employ SDEs in the investigation of fuzzy differential equations[2,6,21-23, 25,26]. Moreover, SDEs are a natural generalization of the usual ordinary differential equations in finite (or infinite) dimensional Banach spaces. In many engineering control systems piecewise constant controls, instead of measurable controls are applied. In this article we prove that for any measurable admissible control
 and for any
and for any  there exists piecewise constant admissible control
there exists piecewise constant admissible control  such that for set solutions of control set system are
such that for set solutions of control set system are  -neighbouring.
-neighbouring.2. Preliminaries
- Let
 be a set of all nonempty (convex) compact subsets from the space
be a set of all nonempty (convex) compact subsets from the space ,
, be Hausdorff distance between sets
be Hausdorff distance between sets  and
and ,
,  is
is  -neighborhood of set
-neighborhood of set .Let
.Let  be in
be in . The set
. The set  is the Hukuhara difference of
is the Hukuhara difference of  and
and , if
, if , i.e.
, i.e. From Radstrom's Cancellation Lemma[47], it follows that if this difference exists, then it is unique.Definition 1[48]. A mapping
From Radstrom's Cancellation Lemma[47], it follows that if this difference exists, then it is unique.Definition 1[48]. A mapping  is differentiable in the sense of Hukuhara at
is differentiable in the sense of Hukuhara at  if for some
if for some  the Hukuhara differences
the Hukuhara differences  exists in
exists in  for all
for all  and there exists an
and there exists an  such that
such that  and
and  Here
Here  is called the Hukuhara derivative of
is called the Hukuhara derivative of  at
at .Consider the Cauchy problem with small parameter
.Consider the Cauchy problem with small parameter | (1) |
 is
is  -dimensional matrix-valued function;
-dimensional matrix-valued function;  is the set-valued map,
is the set-valued map,  .Definition mapping
.Definition mapping  is a solution to the problem (1) if and only if it is continuous and satisfies the integral equation
is a solution to the problem (1) if and only if it is continuous and satisfies the integral equation for all
for all . Here the integral is understood in the sense of[48] (the integral exists for example if
. Here the integral is understood in the sense of[48] (the integral exists for example if  is measurable and the real mapping
is measurable and the real mapping  is integrable on
is integrable on ).Theorem 1[2]. Let the following conditions are true:1)
).Theorem 1[2]. Let the following conditions are true:1)  is measurable on
is measurable on ;2) There exists
;2) There exists  such that
such that  for almost every
for almost every ;3) The set-valued map
;3) The set-valued map  is measurable on
is measurable on ;4) There exists
;4) There exists  such that
such that almost everywhere on
almost everywhere on .Then problem (1) has on
.Then problem (1) has on  exactly one solution.
exactly one solution.3. The Control Set Differential Equation
- We consider following control set differential equation
 | (2) |
 is the control,
is the control,  is the set-valued map.Let
is the set-valued map.Let  be the measurable set-valued map.Definition 3. The set
be the measurable set-valued map.Definition 3. The set  of all measurable single-valued branches of the set-valued map
of all measurable single-valued branches of the set-valued map  is the set of the admissible controls. Obviously, the control set differential equation (2) turns into the ordinary set differential equation
is the set of the admissible controls. Obviously, the control set differential equation (2) turns into the ordinary set differential equation | (3) |
 is fixed and
is fixed and .Let
.Let  denotes the set solution of the differential equation (3), then
denotes the set solution of the differential equation (3), then  denotes the set solution of the control differential equation (2) for the fixed
denotes the set solution of the control differential equation (2) for the fixed .Definition 4. The set
.Definition 4. The set  be called the attainable set of the system (2).Theorem 2[49]. Let the following conditions are true:1)
be called the attainable set of the system (2).Theorem 2[49]. Let the following conditions are true:1)  is measurable on
is measurable on ;2) There exists
;2) There exists  such that
such that  for almost every
for almost every ;3) The set-valued map
;3) The set-valued map  is measurable on
is measurable on ;4) The set-valued map
;4) The set-valued map  satisfies the conditions a) measurable in
satisfies the conditions a) measurable in ;b) continuous in
;b) continuous in ;5) There exist
;5) There exist  and
and  such that
such that almost everywhere on
almost everywhere on  and all
and all ;6) The set
;6) The set  is compact and convex for almost every
is compact and convex for almost every .Then for every
.Then for every  there exists the set solution
there exists the set solution  on
on  and the attainable set
and the attainable set  is compact and convex.Let
is compact and convex.Let  and
and  on
on .Now, we need to establish that for any measurable admissible control
.Now, we need to establish that for any measurable admissible control  and for any
and for any  there exists piecewise constant admissible control
there exists piecewise constant admissible control  such that for set solutions of system (2) holds for all
such that for set solutions of system (2) holds for all 
 Theorem 3. Let the conditions of the theorem 2 are true, and 7) There exists constant
Theorem 3. Let the conditions of the theorem 2 are true, and 7) There exists constant  such that
such that  for all
for all  and
and .Then for every
.Then for every  there exists
there exists  such that1)
such that1)  is constant on every
is constant on every ,
, ;2)
;2) 
 for every
for every ;3) for all
;3) for all 
 where
where ,
, .Proof. We have any
.Proof. We have any  and any
and any . Let
. Let  where
where ,
,  ,
, .Obviously,
.Obviously, 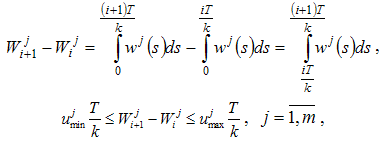 and
and 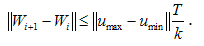 Now we obtain
Now we obtain 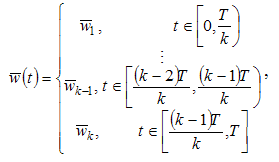 such that1)
such that1)  , where
, where 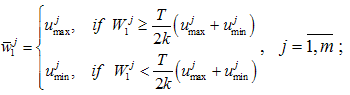 2)
2)  , where
, where 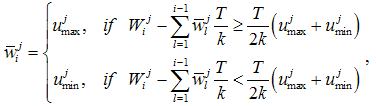
 Obviously, for
Obviously, for  and
and  we have a) if
we have a) if , then
, then 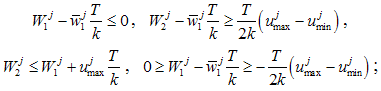 b) if
b) if , then
, then 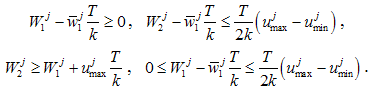 Hence we obtain
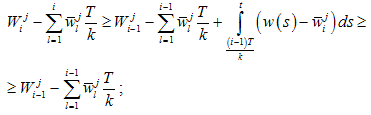
Hence we obtain 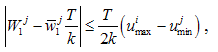 and
and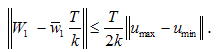 Thus, by induction, we obtain that, for
Thus, by induction, we obtain that, for  and
and 
 ,and
,and | (4) |
 ; then
; then  Now, we take
Now, we take . Then
. Then 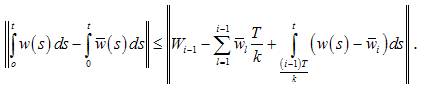 As for all
As for all 
 then
then By (4), we get
By (4), we get 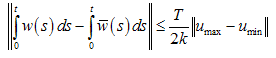 | (5) |
 .Now, applying definition 2 and condition 7 of the theorem, we obtain
.Now, applying definition 2 and condition 7 of the theorem, we obtain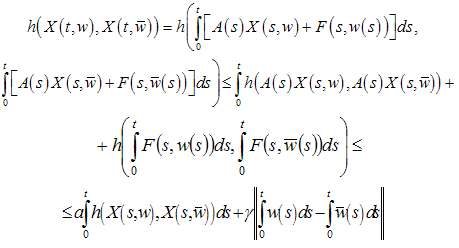 Using Gronwall-Bellman's inequality, we obtain
Using Gronwall-Bellman's inequality, we obtain By (5), we have
By (5), we have  Theorem is proved.Remark. Obviously, if we take
Theorem is proved.Remark. Obviously, if we take ; then
; then  for all
for all .
.4. Conclusions
- Here we used the approach of Hukuhara at definition of the derivative which has essential shortages. However the given approach is well investigated by many authors. Also in the literature exist other approaches to definition of the derivative[2,3,9,21,29,36], but also they have the shortages. It is easily possible to show that this outcome will be true for some other cases with little changes.Also we remark that this result helps to build
 -optimal piecewise constant controls for optimal control set system (Mayer problem, time-optimal problem and other).
-optimal piecewise constant controls for optimal control set system (Mayer problem, time-optimal problem and other).