M. Gai1, G. Guglieri2, M. G. Lattanzi1, A. Lombardi2, M. Mana2, L. Masserano2, I. Musso3, P. Navone3
1Istituto Nazionale di Astrofisica (INAF), Osservatorio Astrofisico di Torino, Via Osservatorio, 20 - 10025 Pino Torinese, Italy
2Politecnico di Torino, Dipartimento di Ingegneria Meccanica e Aerospaziale, Corso Duca degli Abruzzi, 24 – 10129 Torino, Italy
3ALTEC - Advanced Logistics Technology Engineering Center, Corso Marche, 79 - 10146 Torino, Italy
Correspondence to: G. Guglieri, Politecnico di Torino, Dipartimento di Ingegneria Meccanica e Aerospaziale, Corso Duca degli Abruzzi, 24 – 10129 Torino, Italy.
| Email: |  |
Copyright © 2014 Scientific & Academic Publishing. All Rights Reserved.
Abstract
In presence of economic constraints the governments have not always the funding necessary for the realization of space missions and international space agencies throughout the world are forced to limit part of their activities. Stratospheric balloons may constitute a valid economic alternative and this activity is fostered in Italy both by public and private companies. The mission described in this paper arises from the joint effort of ALTEC (Advanced Logistic Technological Engineering Center), Politecnico di Torino (PoliTo) and Osservatorio Astrofisico di Torino (OATO) in the development of a low-cost experiment based on the launch of a stratospheric balloon. The project started in late 2012 and evolved in the launch of a weather balloon from the airport of Cuneo-Levaldigi in December 2013. The balloon carried a payload of about 3 kg and included a digital camera, a smartphone and a radio-sonde. The camera captured pictures and videos during most of the flight. The radio-sonde collected weather data and was used together with the smartphone to track the system position in real time. Moreover, the trajectory was predicted using a software tool that has been developed during the project. After the launch, the balloon began to rise at an average speed of 5 m/s and it burst after 100 minutes at an altitude of 29356 m. Then, after a slow parachuted descent, the payload landed afloat in the Ligurian Sea, at about 5 km from the coasts of Albenga (Savona, Italy). Fortunately, the payload has been recovered the same day at local 8:00 p.m. together with the data gathered by the camera and the smartphone. The data from the flight have been used as a validation tool for the mission simulator. At the same time, the payload shall be a prototype system to be used as a reference in future missions.
Keywords:
Stratospheric Balloons, Near Space, Atmospheric Soundings, Earth Observation, Trajectory Simulation
Cite this paper: M. Gai, G. Guglieri, M. G. Lattanzi, A. Lombardi, M. Mana, L. Masserano, I. Musso, P. Navone, A Scientific Mission Based on a High Altitude Stratospheric Balloon, International Journal of Aerospace Sciences, Vol. 3 No. 1, 2014, pp. 18-29. doi: 10.5923/j.aerospace.20140301.03.
1. Introduction
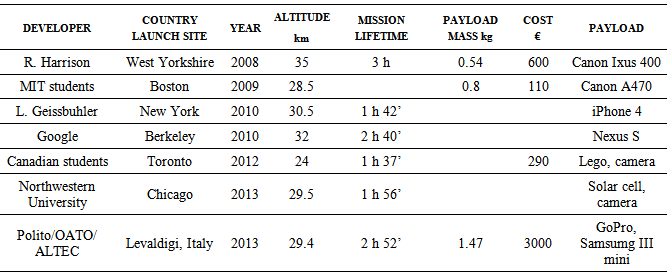
Scientific ballooning developed in the early 19th century, a few years after the invention of the hot air balloon by the Montgolfier brothers. The first experiments were complete hazardous flights conducted without any protection. In 1804, the French scientist J. L. Gay-Lussac used a hot air balloon to ascend to a height of about 7 km with a barometer, a thermometer, and a hygrometer on board. In 1862, the British scientist J. Glaisher established the primacy of attaining an altitude of 10 km. In the early 1930s, the development of a new kind of balloon film made of low density polyethylene marked the birth of modern scientific ballooning. By using this thin, tough and elastic film, scientific balloons became lighter, making thus easier to exceed altitudes of 30 km. Further improvements, such as the invention of the zero pressure balloons, were made in the 1940s by some researchers from U.S. universities and U.S. Navy. Their work led to the definition of the features that still today could be found in almost every modern scientific balloon.Large scientific balloons can soar up to an altitude of 35-40 km and carry a payload mass of more than 1 ton. For instance, during the BOOMERanG experiment (Balloon Observations Of Millimetric Extragalactic Radiation and Geophysics) a large zero pressure balloon carried a 1500 kg scientific instrument in the stratosphere in order to measure the cosmic microwave background anisotropies. A complete description of this experiment can be found in [4].Besides large unmanned balloons, there is another class of lighter stratospheric balloons, known as weather or sounding balloons, and used for meteorological purposes. Before the launch, these latex-made balloons are partially inflated with a lighter-than-air gas (generally helium) and then they are sealed, assuming a spherical shape. After the launch a sounding balloon begins to expand until it reaches an altitude (30-35 km in about 100 minutes) at which the envelope material can no longer expand and the balloon bursts. The typical payload of a sounding balloon consists of a radiosonde able to trace profiles of atmospheric variables (temperature, relative humidity, modulus and direction of wind, O3 concentration) up to 30 km or more. After the burst, the payload returns to the ground slowed down by a parachute with an impact velocity of 5-10 m/s.Beside meteorological purposes, in recent years more and more sounding balloons are used to conduct other kinds of experiments. Some balloons are launched by amateurs with a payload that most often consists of a smartphone and a video camera for amateur footage of the near space. Other balloons carry more elaborate scientific payloads developed by university research teams or private companies. Table 1 shows features of some scheduled missions based on the launch of sounding balloons. For example, the Icarus Project is a scheduled programme composed of several launches of weather balloons conducted by Robert Harrison, (West Yorkshire, U.K.) from 2008 to 2010. A typical mission profile consisted of sending a balloon into the upper stratosphere with a Canon A560 attached. He used a GPS tracking technology similar to an in-car sat-nav to follow its progress and an attached radio transmitter to find it when it parachutes back to Earth. A single mission budget did not exceed €600.In summer 2009, two students from MIT put together a low-budget rig to fly a camera high enough to photograph the curvature of the Earth. They filled a weather balloon with helium and hung a Styrofoam beer cooler underneath to carry a cheap Canon A470 compact camera. Instant hand warmers kept things from freezing up and made sure the batteries stayed warm enough to work. After the launch the payload reached a height of 28.5 km above sea level. In order to find the rig when it landed they dropped a prepaid GPS-equipped cell-phone inside the box for tracking. Total cost: €110.In August 2010 an amateur team launched an iPhone 4 and a HD video camera by a weather balloon up to 30.5 km above the planet's surface. The team did not use the iPhone 4's camera capabilities, but instead used the smartphone as a GPS tracking device for their device. The payload included an insulated capsule with hand warmers to keep the electronics from freezing, a GoPro HD video camera and an iPhone 4. The balloon lifted off from Newburgh, New York in August 2010, and the team found their payload case about 50 km from the launch site. The result of the capsule's voyage was a 100-minute video including some impressive high altitude shots of the planet.Always in 2010, a team composed of Google and students from the University of California ran an experiment with the Samsung Nexus S smartphones to see how well the smartphone sensors and accelerometers worked when the temperatures decreased. Engineers put the Nexus S smartphones into special coolers with GPS antennas on them, tied them to weather balloons, and then let them go. The balloons were able to reach 32 km above the ground before the balloons burst and the phones started the descent, which took 20-30 minutes. After the smartphones were retrieved, they still worked despite the extreme temperatures at the heights the balloons reached.In January 2012, two Canadian amateur students sent a Lego astronaut into near space, capturing amazing footage around 24 km above sea level. They assembled a lightweight Styrofoam box, in which they placed three cameras programmed to take continuous shots and one wide-angle video camera. They bought a professional weather balloon online and a helium tank from a party shop in order to propel the device upwards. They made a nylon parachute to help it return to Earth intact, and added a smartphone with a downloaded GPS app to allow them to track it. Their craft climbed to around 24 km in an hour and five minutes, before the weather balloon exploded and the capsule began its 32-minute return to Earth.In May 2013, a team of four undergraduate students from Northwestern University launched a weather balloon which carried a solar cells array in order to understand how solar cells behave at high altitude. The balloon reached an altitude of 29.5 km. The team assumed that closer proximity to the sun would mean more intense rays and better performance. The experiment showed that the best performances are reached around 15-18 km from the Earth’s surface. Solar cells are more efficient as they get colder. As altitude increases, the air temperature gets colder, but above 18 km it becomes warmer again. Therefore, the air is coldest between 15 and 18 km and the best performances are reached in this range of altitude.In December of the same year, PoliTo, ALTEC and OATO team launched the balloon described in next sections. The launch was carried out from the international Cuneo-Levaldigi airport on the day December 9th and the payload was successfully retrieved the same day at about 5 km from the coast of Albenga (Savona, Italy).Table 1. State of the art: review of flight missions and projects
 |
| |
|
2. Mission Design
The present work is divided in three macro-areas: • mission design and planning, including the development of a trajectory simulator;• payload development and integration;• flight segment, i.e. the balloon-parachute system and its interfaces with other systems. Because this mission serves as a technology demonstrator, it was decided to launch a small payload, with a maximum of 3-4 kg. Then, the balloon was selected according to this mass constrint. The ICAO reguation classifies unmanned free balloons as:• light, carrying a payload of one or more packages with a combined mass of less than 4 kg, unless qualifying as a heavy balloon in accordance with the classification shown in table 2.• medium, carrying a payload of two or more packages with a combined mass of 4 kg or more, but less than 6 kg, unless qualifying as a heavy balloon in accordance with the classification shown in table 2;• heavy, a balloon able to carry a payload which:1. has a combined mass of 6 kg or more;2. includes a single package of 3 kg or more;3. includes a package of 2 kg or more with an area density of more than 13 g/cm2;4. uses a rope or other device for suspension of the payload that requires an impact force of 230 N or more to separate the suspended payload from the balloon.The area density is determined by dividing the total mass of the payload package by the area of its smallest surface.In order to reduce mission time schedule due to regulatory constraints, it was decided to use a light balloon able to carry above an altitude of 30 km a payload mass less than 4 kg and with an area density of less than 13 g/cm2. The payload included a digital camera, a GSM smartphone and a localizer. These devices were placed into a Styrofoam cubic box tethered to the balloon and to a parachute through a nylon wire. Right before the launch, the balloon was inflated with helium and sealed. In a typical mission profile, as the balloon soars at an average ascending rate of 4.9 m/s, it expands until the system reaches an altitude (30-32 km) at which the balloon bursts. The ascent usually lasts 90-100 minutes and after the burst the payload begins to fall, slowed down by the parachute. The system eventually returns to the Earth’s surface in 50-60 minutes and it should be recovered by a designated team.In order to support the payload retrieval operations, a model for trajectory prediction has been implemented to forecast the balloon trajectory up to 7 days before the real launch. The application is structured in two levels. The first level provides a physical model for ascent and descent. However, the typical mission profile for the balloon and the parachute selected for this project were not available before the launch and then the simulation was not perfectly congruent with reality. A calibration of the model was possible only after gathering the data from the real launch. The second level computes the balloon’s latitudinal and longitudinal displacement, according to the hypothesis that the system moves with the same intensity and direction of wind.Table 2. ICAO regulations
 |
| |
|
3. Trajectory Simulation
3.1. Ascent Thermodynamic Model
The ascent is modelled by applying the equilibrium of forces to the balloon, which is virtually represented as a point-like object. Buoyancy, weight and aerodynamic drag, which are the three forces applied to the balloon, lead to write the equation of motion as | (1) |
where mtot includes the gross mass, the mass of helium and the added mass, which takes into account the mass of the air moved by the balloon during the ascent: | (2) |
The balloon is subjected to a variety of heat radiations. The higher the net positive radiation hitting the balloon latex film, the higher the temperature of the gas inside the balloon. As a consequence, an increase in the internal temperature leads to an increase in the balloon volume: in facts, the latter is proportional to the temperature according to the ideal gas law.The rise in volume is the main responsible for the rise in the balloon vertical velocity, commonly called ascending rate, because in the equation of motion the acceleration is observed to depend on volume. Other relations involving the mentioned heat fluxes are necessary to complete the system:• the balloon volume, where pressure is assumed to be steadily equal to external air pressure | (3) |
• the conservation of energy applied to the helium inside the balloon | (4) |
• the thermal balance applied to the balloon latex-made envelope | (5) |
A detailed formulation of the heat sources in (5) can be found in [2].
3.2. Descent Model
After the balloon bursts, the payload starts to drop slowed down by a parachute. The system acts as it is not subjected to inertial acceleration: after a brief transient of time weight is perfectly balanced by aerodynamic drag; then, the payload will fall down at an approximately constant speed called terminal velocity | (6) |
Actually, as this term is inversely proportional to the square root of air density, which is a decreasing function of altitude, the payload will face a slow deceleration while it approaches the ground. Then, the system starts to drop at 30-35 m/s and it will finally land with an average terminal velocity of 5-10 m/s.
3.3. Lateral Displacement
Winds blowing on the balloon surface prevent the system to stay on the vertical of the launch site during the flight. In the simulation it is assumed that the flight segment and the payload move at the same intensity and direction of the wind. The eastern and the northern component of the wind (commonly called u and v respectively) are obtained from forecast meteorological data contained in Grib2 files provided by NCEP (National Center for Environmental Prediction). GribB2 is a format representing a total coverage forecast for the entire planet’s surface relative to a precise time and with a resolution of 0.5° both in latitude and longitude. Temperature, pressure and wind components are available at different altitude levels up to 30-32 km, and for a particular zone of interest these data can be extracted using a command line program called Degrib, which is able to generate a square grid of virtual soundings, where each grid point is chosen by the user, inserting the desired coordinates.Thanks to Grib2 files it was possible to simulate the trajectory even 7 days before a hypothetic launch. Then, by daily monitoring the trajectory, it was possible to select with adequate notice the best weather and logistic conditions for the payload retrieve.
3.4. Algorithm Structure
The integration method used to simulate the altitude profile is explicit Euler with an integration step of 0.25 s. The smoothness of the altitude profile guarantees that this method simulates reality with good approximation in spite of its simplicity.In a single integration step the algorithm computes up-to-date heat fluxes, volume and acceleration. By integrating the latter, it is possible to update the ascending rate and consequently calculate the altitude increment. At every step, the lateral displacements are computed for the current system coordinates: u and v components for that particular position are obtained by interpolating the data available from the soundings contained in the previously created grid. The ascent is stopped when the volume computed is equal to the maximum value provided by the manufacturer. After the burst, the simulation continues with the equations of the descent model.
3.5. Output
The described algorithm is implemented in Matlab. At the end of the simulation, when the payload will virtually impact to the ground, position and time are saved in arrays and then converted into kml format, which can be visualized in Google Earth. Finally, other graphs can be obtained, as the altitude-time profile or the ascending rate and the terminal velocity plotted as a function of altitude.
4. Flight Segment and Payload
 | Figure 1. Flight segment |
The flight segment consists of the balloon and the parachute breaking system. The latter is hanged up under the balloon so that, after the burst, the parachute is opened automatically by the gravitational action of the weight placed below. The payload includes a GoPro digital camera and a smartphone put inside a Styrofoam protective case, whereas the radio-sonde was tethered to the case by means of a nylon wire.
4.1. Balloon
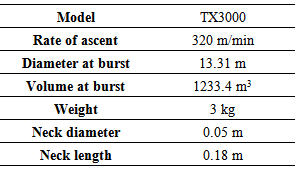
To lie in the category of light balloons, it was chosen the Totex TX3000, whose specification can be found in Table 3. Table 3. Balloon specifications
 |
| |
|
4.2. Parachute
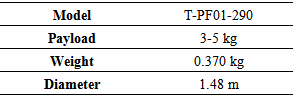
The parachute selected for the mission is the Totex T-PF01-290, complying with the size of the balloon and the weight of the system.Table 4 summarizes the main parachute specifications.Table 4. Parachute specifications
 |
| |
|
4.3. Digital Camera
Earth remote sensing and sky observation was performed using a commercial digital camera: the GoPro Hero3 Black Adventure. This compact and light device offers different modes of operations. The “Simultaneous Video and Photo” mode was used throughout the flight to capture video and photos at the same time. The camera was provided also with a plexiglass protective case and an external battery, which prevented the device from switching off due to the extremely low temperature of the stratosphere.
4.4. Smartphone
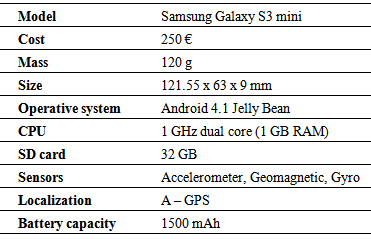
A Samsung Galaxy S3 mini was used to track the balloon trajectory by way of its assisted GPS capabilities. Furthermore, two applications were responsible for recording the smartphone sensors data throughout the flight. The smartphone used its 3G band to save these data in real time on a web cloud service. In particular, “Sensor Track” app was used to gather information about the smartphone accelerometer, gyro and battery status; at the same time, the “GPS logger” application, recorded the system latitude, longitude and altitude, saved them in text and kml format, and finally stored them in the web cloud account.Moreover, the device was equipped with an external battery (mass is 122 g and capacity is 5600 mAh) in order to increase the entire operative lifetime. Table 5 shows the smartphone specifications.Table 5. Smartphone specifications
 |
| |
|
4.5. Box
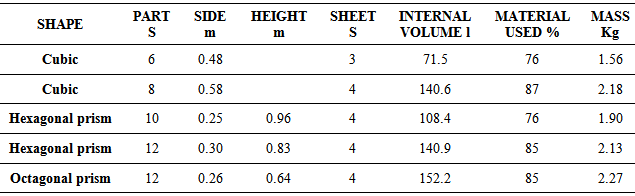
Above an altitude of 10 km the atmospheric temperature may be under 220 K (-53°C) and the wind may be responsible for strong oscillations, involving every degree of freedom. An expanded polypropylene (EPP) box is then realized to keep structural integrity and thermal insulation for the payload sub-elements. EPP is a valuable material for the case design because it ensures a very low thermal conductivity (0.039 W/mK).The internal volume of the case has been optimized through modelling different shapes and Table 6 shows the obtained results.Table 6. Box layouts and features
 |
| |
|
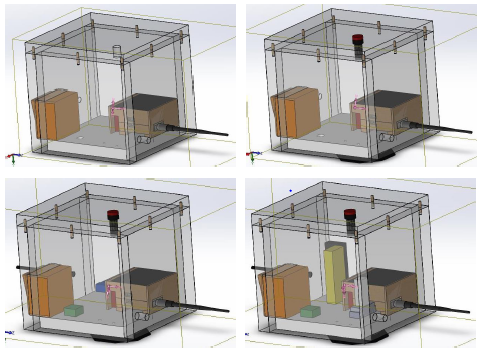 | Figure 2. Sequence of components integration inside the box |
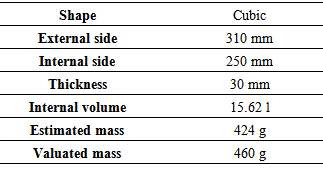
Although the maximum internal volume is achieved by the octagonal prism configuration, a more suitable, simpler and lightweight cubic box has been realized. In order to reduce the mass of the box, the three following methods have been taken into account:• to reduce the box surfaces, while keeping the same thickness;• to reduce the thickness, while keeping the same box surfaces;• to reduce both the thickness and the surfaces.The last two solutions have the advantage of a greater internal volume, but they are more difficult to implement and then only the first approach is applied. Table 7 reports the final features of the box.Table 7. Final box features
 |
| |
|
4.6. Internal Layout
Once defined the geometry, the payload elements should be placed inside the box to minimize the total moments of inertia and match the centre of gravity with the geometric centre of the box (figure 2).The digital camera and the smartphone are put first inside the case in order to reduce electromagnetic interference and prevent the darkening of the lenses during the flight. Finally the box is divided in cardboard compartments to ensure the components to be locked in their room and thus preventing reciprocal damage.
4.7. Radiosonde
As previously explained, the radiosonde is the usual payload of a sounding balloon. The model selected for this mission is the GPS RS92, developed by Vaisala, one of the largest radio-sonde manufacturers in the world. This battery-powered device has a mass of 270 g and is equipped with sensors for temperature, humidity and pressure. Wind modulus and direction are computed indirectly from the space-time coordinates reported by the GPS. The radio-sonde is hanged up under the EPP case through a nylon wire in order to ensure a proper operation for the antenna (which transmits in the range 400-406 MHz) and for the other sensors. Besides atmospheric measurements, the sonde has been chiefly used as trajectory tracking system throughout the flight.
5. Flight Experiment
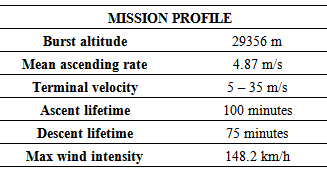
Launching a stratospheric balloon in a controlled air space may present some technical difficulties. Then, the schedule and location of the experiment was established together with the airport of Levaldigi and the Italian national authority, which suggested the normative procedures for the launch. Because the Totex TX3000 lies in category of “light balloons”, there was no need for any NOTAM to authorize the launch. The launch-site was set up next to a hangar placed within the airport perimeter and far from any take-off or landing fields. Pre-launch operations, including balloon inflation and payload assembling, have been carried out inside the hangar. Ten minutes before the launch, the payload case and the radio-sonde were linked to the flight segment and then the overall system was moved outside the hangar. A few minute before the launch the radiosonde was switched on and started to be tracked by the ARPA (Agenzia Regionale per la Protezione ambientale) ground station in Turin. At 12:14 PM, after approval from the airport’s control tower, the payload has been launched and started its ascent at an average rate of 4.9 m/s. The trajectory was monitored in real time by ARPA thanks to the radio-sonde GPS signal. At the same time, a remote ALTEC operator was continuously checking the text and kml data stored in the web cloud service by the “GPS Logger” application, which was updating the smartphone position with a time rate of 1 sec. However, the smartphone stopped to store data using the 3G band when the balloon reached an altitude of almost 4 km. Moreover, the up-to-date trajectory provided by the radio-sonde was sent in real time to the retrieve-team members, who were receiving the radiosonde signal through an antenna and then displayed the trajectory in real time on a laptop. Then, immediately after the launch, this team started to follow the balloon by car. During the pursuit the trajectory simulation was restarted by updating the initial conditions in real time. Unfortunately, the model and the weather forecast were affected by critical uncertainties and the simulation showed a landing point 30 km east of the real one. The payload landed afloat, at about 5 km from the coast of Albenga (Savona, Italy) and it was retrieved the same day, around 8:00 pm, thanks to local fishermen who ferried one of the operators in the exact GPS position sent by the smartphone, which started to broadcast again and save its position on the web when the payload was below 4 km. From the coordinates of the point of impact (44.0600° N, 8.2358° E), it can be inferred that the payload reached a distance of 77 km from launch site with an azimuth relative to Levaldigi of 136°.Table 8 summarizes the data of the mission profile.Table 8. Mission profile
 |
| |
|
5.1. GoPro
The GoPro camera provided pictures and video during most of the mission. These are perfectly in focus, even if after the passage through clouds a temporary halo appears on the camera lens. Despite unavoidable image distortions, the camera proved to properly endure the strong oscillations of the ascending balloon, especially after the balloon burst. Some altitude-referenced pictures are shown in figures 3 and 4.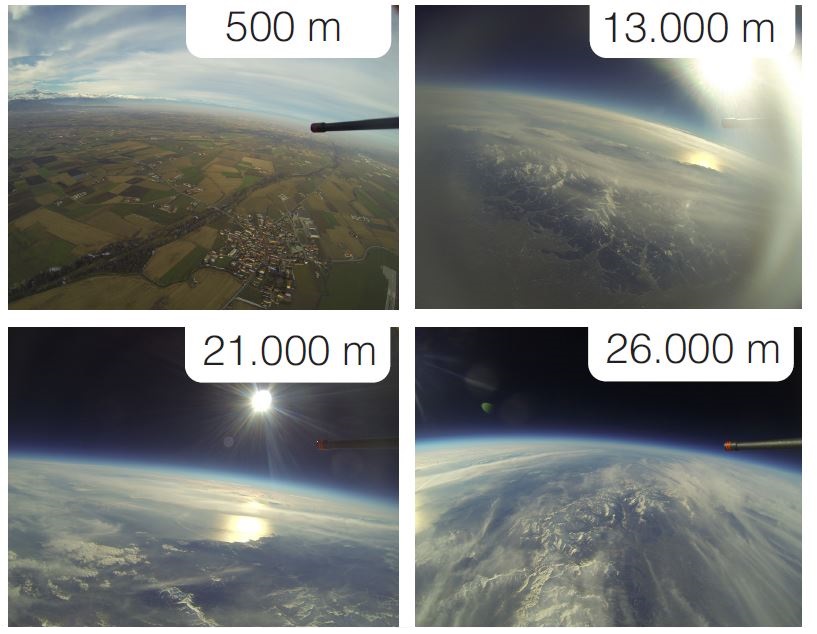 | Figure 3. Low altitude pictures captured by the digital camera |
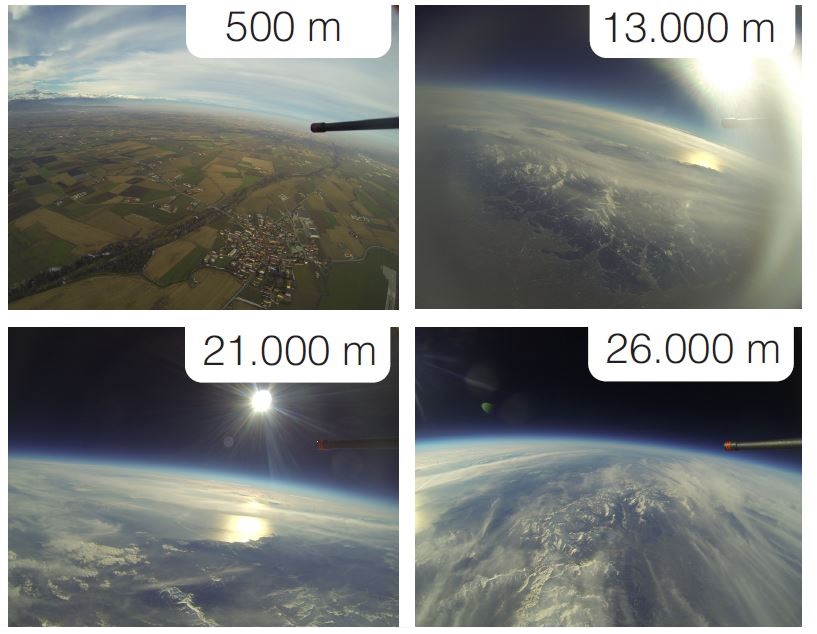 | Figure 4. High altitude pictures captured by the digital camera |
5.2. Radiosonde
During the flight, the radio-sonde was not placed inside the protective case and it stopped to work a few minute before the landing due to interferences caused by local orography. Nevertheless, it was the only device able to provide a correct trajectory for most of the flight time. The trend of different atmospheric variables, including temperature, wind modulus and direction can be derived by the data collected by the radio-sonde atmospheric sensors and automatically sent to ARPA during the flight. In figure 5, for example, the temperature is observed to be lower than the standard ISA (International Standard Atmosphere) temperature profile.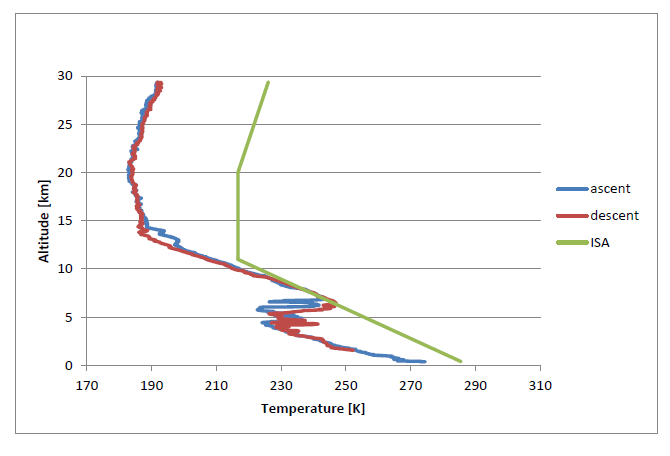 | Figure 5. Temperature profile |
5.3. Smartphone
The smartphone, which relied exclusively on the 3G network, lost the signal when the balloon reached an altitude of 4 km, and the broadcasting resumed when the system was below the same altitude. As a result, the applications had a discontinued behaviour, as shown in Figure 6.The smartphone position was again available when the system landed in the sea, thanks to the floating EPP case which prevented all the payload components to touch the water.Figure 7 shows the trend of the accelerations recorded by the accelerometer throughout the flight. The peak at 2 PM represents the phase following the balloon burst.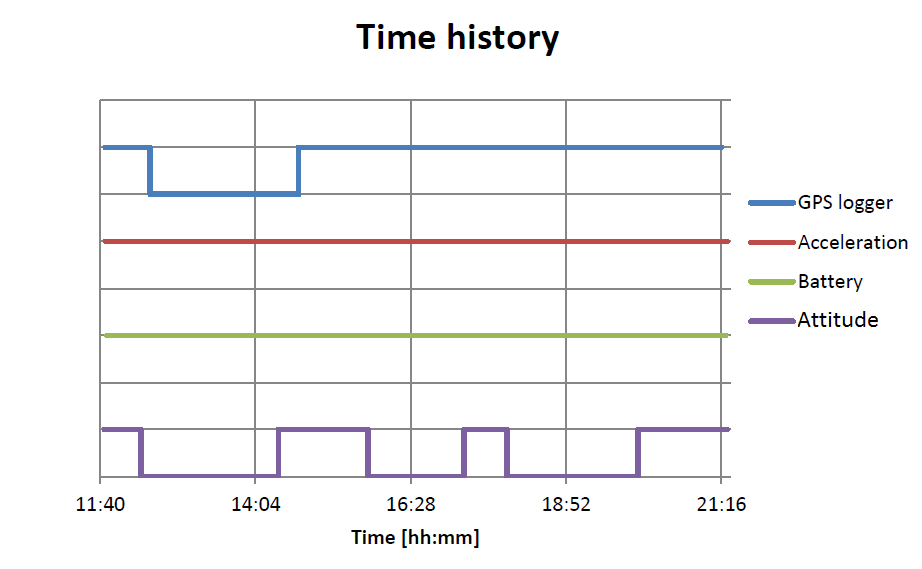 | Figure 6. Apps time history |
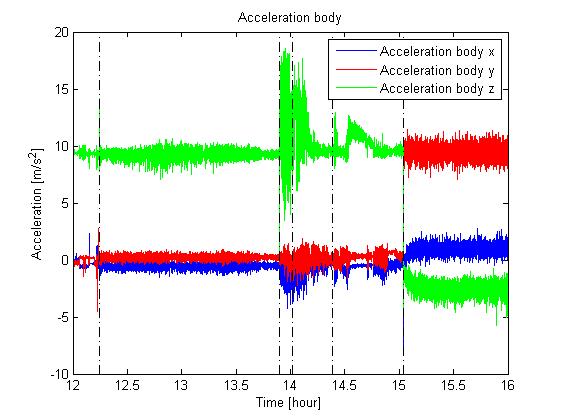 | Figure 7. Accelerations graph from the smartphone accelerometer |
6. Model Improvements
The right side of Figure 8 shows that according to the simulation the payload would have landed at 62.51 km from Levaldigi with an azimuth of 151° relative to the launch site; whereas the left side represents the real trajectory, showing that the payload reached 77 km from launch site with a relative azimuth of 136°. The distance between the real and simulated point of impact is about 18.3 km. This gap may be caused by:• uncertainties in the ascending rate estimation and as a consequence in the altitude profile;• uncertainties in the terminal velocity estimation;• uncertainties in the forecasting wind profiles used as input for the simulation.For future missions, it is essential to correct the trajectory simulation to further decrease the risk of missing the payload after the landing.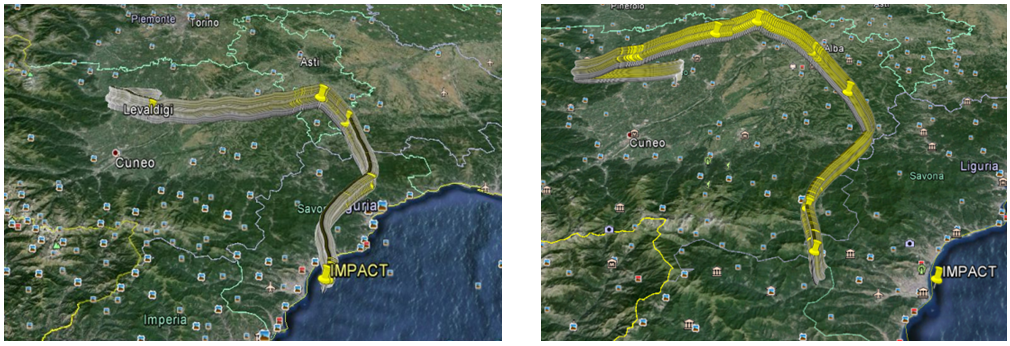 | Figure 8. Real trajectory (left) and predicted trajectory (right) |
6.1. Uncertainty from Ascent and Descent Profiles
The actual average vertical velocity is 4.9 m/s and it keeps almost constant during the ascent. The simulated profile of vertical velocity is obtained by imposing the net lifting force to be 15% greater than the weight of the system. This value was selected before the launch in order to get a trajectory quite far from the sea. Figure 9 shows that at the launch the simulated ascending rate is underestimated, while it gradually increases with altitude. As a result, the slope of the simulated ascent profile (left side of Figure 10) is lower than the real case and the burst time is attained 110 minutes after the launch, about 10 minutes later than reality.On the contrary, the simulated descent lasts only 35 minutes, a considerably shorter time compared to the real descent that lasted 75 minutes. This trend could be explained by the terminal velocity profile in the right side of Figure 10, as the simulated velocity is higher than the real velocity, probably due to an underestimation of the parachute aerodynamic drag coefficient.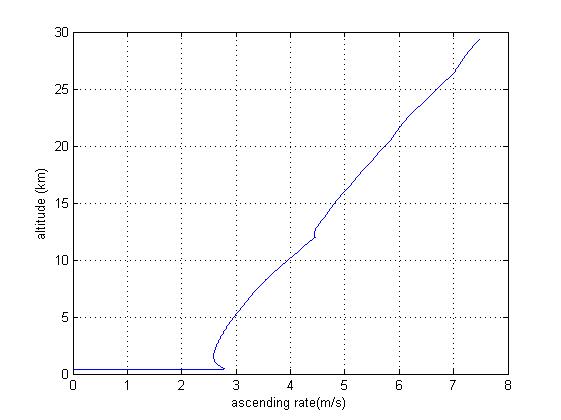 | Figure 9. Simulated ascending rate profile |
6.2. Uncertainty from Wind Profiles
The simulated trajectory is affected by inaccuracy due to uncertainties in the wind weather data contained in the Grib2 files. Figure 11 shows a comparison between predicted and real wind: the latter is recorded by the radiosonde during the flight.In particular, the blue curves are the real u and v wind components, and red curves represent the wind profile derived from the Grib2. Even if v fits the measured data, u diverges about 40 minutes after the launch. This trend leads to a gap between the computed longitude and the real longitude path, while the computed latitude fits almost perfectly the real latitude path, as shown in figure 12.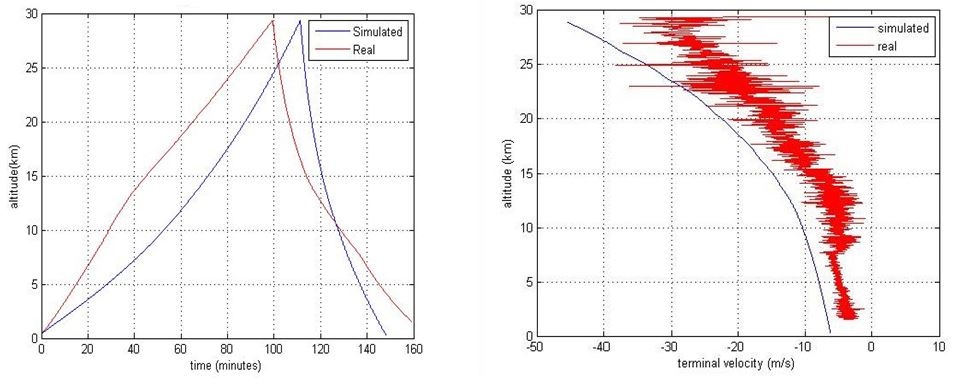 | Figure 10. Altitude-time trend (left) and terminal velocity (right) |
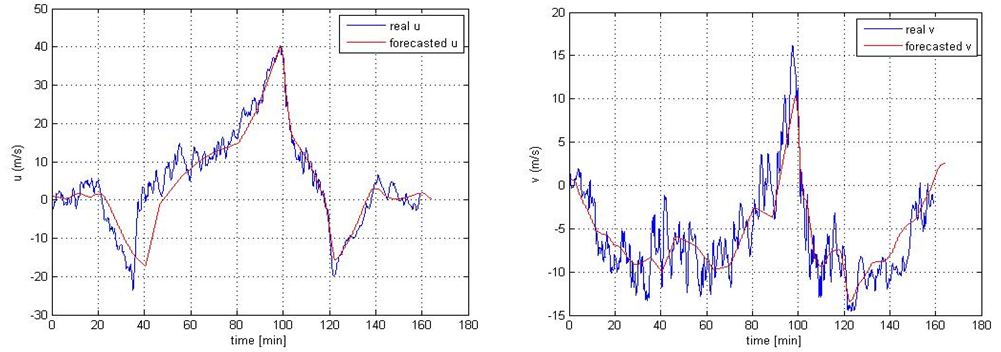 | Figure 11. Comparison between real and simulated u (left) and v (right) wind profiles |
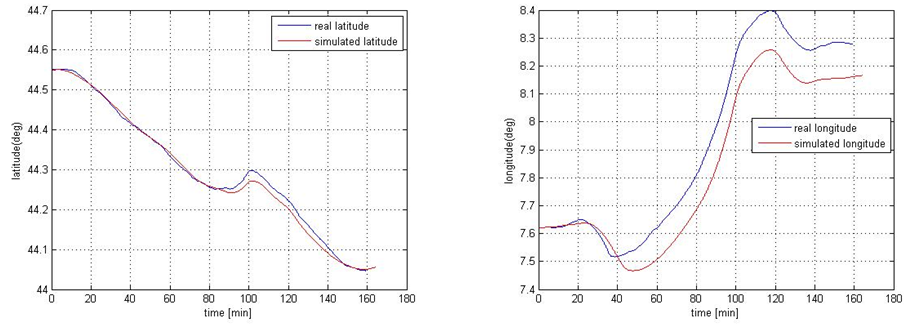 | Figure 12. Latitude (left) and longitude (right) trend with time after the model calibration |
6.3. Helium Mass Estimation
The helium used to fill the balloon should have guaranteed a buoyancy greater than the gross mass of the system, which is about 6 kg and includes the balloon, the parachute and the payload mass. In order to better quantify buoyancy, the percentage of inflation φ, which usually varies between 0.1 and 0.3, is defined as | (7) |
This parameter may be chosen to change the ascent profile since it deeply influences the initial ascending rate and its evolution with time. This means that φ may be varied to shift the trajectory in order to obtain the most suitable point of impact in terms of payload recovery operations. However, on the launch date it was difficult to estimate the exact mass of helium because the inflation was carried out without any control due to logistic and lack of time issues. From figure 1, it can be derived an initial balloon volume of 9.7 m3, whereas equation (3) provides a mass of helium of 1.649 kg. As a result, from relation (6) the percentage of inflation φ is 0.75. This very high value means that the balloon was probably over-inflated and it may explain why the balloon burst only at 29356 m, although the balloon was designed to reach an altitude of 35 km.
6.4. Post-Calibration Results
The model is calibrated taking into account the uncertainties earlier described, and a new trajectory simulation is performed. Now, the only not negligible source of error lies in the wind forecast contained in the grib2 files used as input.Figure 12 shows that the forecasted latitude fit almost perfectly the real data provided by the radiosonde, whereas the forecasted longitude diverges from reality 40-50 minutes following the launch. Since this gap keeps for the remaining part of the mission lifetime, the real landing point is about 7.8 km east of the predicted point of impact, as shown in Figure 13.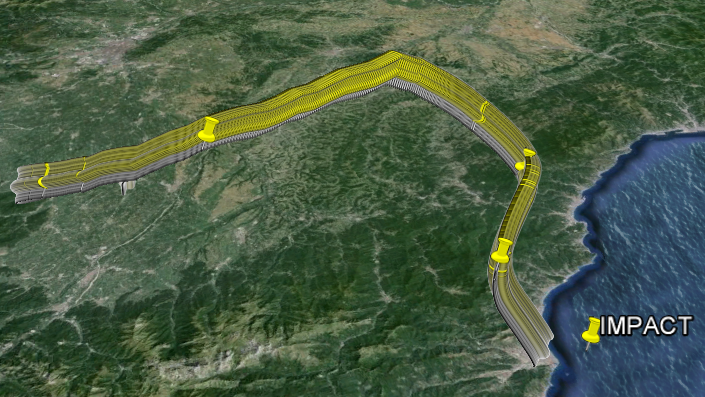 | Figure 13. Post calibration trajectory and real point of impact |
7. Conclusions
In this project a low-cost scientific mission has been developed, and it has finally resulted in the launch of a payload through a weather balloon from the Cuneo-Levaldigi international airport. The camera captured pictures and videos from near space up to a height of about 30 km. The radiosonde provided a real time trajectory and atmospheric variables at different altitudes. Thanks to this precious information, the trajectory simulator has been calibrated, despite the reliability of forecasting data, which still remains the main source of uncertainty. The experiment proves that by means of a sounding balloon it is possible to:• reach the stratosphere with medium cost and simple solution;• capture imagery of the near space, a zone little explored by any spacecraft;• perform Earth remote sensing from the stratosphere;• obtain atmospheric profiles;Although the payload recovery remains the most difficult task, the retrieve of the imagery and other data does confirm the success of the mission. Then, this early experiment represents only the first step of a larger plan that includes the realization of more complex launches with possible use of larger balloons and more elaborate payloads.
ACKNOWLEDGEMENTS
This work has been supported by ALTEC, Osservatorio Astrofisico di Torino and Politecnico di Torino.The authors would like to acknowledge the staff of Cuneo-Levaldigi international airport for supplying the facilities and enabling the launch in December 2013. Special thanks go to the staff of ARPA Piemonte, in particular to Luca Tomassone and Nicola Loglisci, for the assistance given in the launch procedures and for providing the weather data necessary for the trajectory forecast. The authors are particularly grateful for the assistance given by Guido Traverso in the realization of the payload protective case.Special thanks go to Davide Monge and Diego Bussi, for the great help in finding and retrieving the payload after the landing.
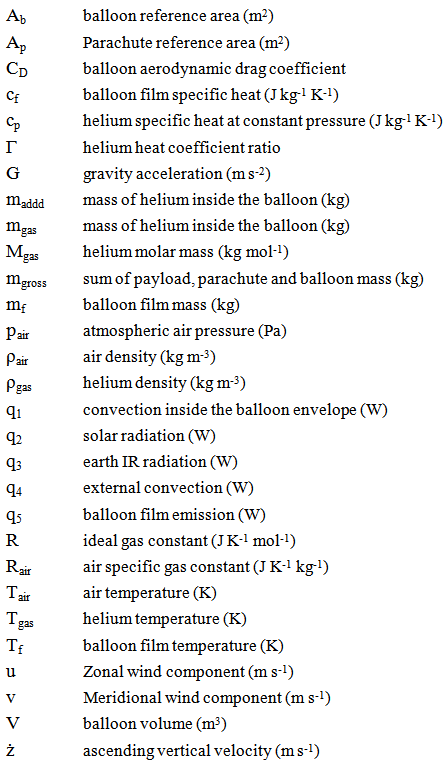
List of Symbols
References
| [1] | N. Yajima et al., Scientific ballooning, Tokyo, Springer, 2004. |
| [2] | A. L. Morris, Scientific ballooning handbook, Part 1, Boulder, Colorado, NCAR Technical Note, 1975. |
| [3] | K. M. Aaron, M. K. Heun and K. T Nock, Balloon trajectory control, AIAA International Balloon Technology Conference, Norfolk, VA, 1999. |
| [4] | S. Masi et al., Boomerang: a Scanning Telescope for 10 arcminute resolution CMB Maps, "3K Cosmology", EC-TMR Conference, AIP conf. proc. 476, 1999. |
| [5] | M. K. Heun, R. S. Schlaifer, and K. T. Nock, Trajectory simulation for single balloons and networks, Adv. Space Res., 30(5), 1239-1244, 2002. |
| [6] | I. Musso, A. Cardillo, et al., A balloon trajectory prediction system. Adv. Space Res., 33 (10), 1722–1726, 2004. |
| [7] | G. Morani, R. Palumbo, G. Cuciniello et al., Method for prediction and optimization of a stratospheric balloon ascent trajectory, J. Spacecraft Rockets, 46 (1), 126–133, 2009. |
| [8] | R.Karol et al., High Altitude Ballooning for Space and Atmospheric Observation, Pasadena, CALTECH, 2012. |
| [9] | H. Cole et al., Radiosondes, Boulder, CO, USA, National Center for Atmospheric Research, 2003. |
| [10] | A. Feldman et al., High Altitude Balloon Photography, New Jersey, NJ Governor's School of Engineering and Technology, 2011. |
| [11] | J. Jaworski et al., Innovative camera pointing mechanism for stratospheric balloons, Warsaw, Warsaw University of Technology, 2009. |
| [12] | J. Jaworski et al., Aerospace Robotics, Ottawa, Canada, Springer, 95-107, 2013. |
| [13] | A. Cardillo, A. Memmo, I. Musso et al., Analysis and prediction of stratospheric balloons Trajectories, Memorie Società Astronomica Italiana vol. 79 (3) pp. 915 – 919, 2008. |
| [14] | I. Musso, A. Cardillo et al., Software and methodologies for stratospheric balloons’ flight prediction, 3th AIAA Aviation Technology Forum, Denver, Colorado, Nov 03. |
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTML