J. E. Jam1, Aref A. Fard2
1Composite Materials and Technology Center, Tehran, Iran
2Mechanical Engineering Department, Ferdowsi University of Mashhad, Mashhad, Iran
Correspondence to: J. E. Jam, Composite Materials and Technology Center, Tehran, Iran.
| Email: |  |
Copyright © 2012 Scientific & Academic Publishing. All Rights Reserved.
Abstract
Applications of impact damper to reduce machine tools vibration have been investigated analytically, numerically, and experimentally for many years. The reason for this interest lies in the fact that impacts occur very often in many modern technical devices. In different applications, optimal values of impact damper parameters (impact mass, elastic coefficient of barrier etc.) should be found in order to damp vibrations efficiently. We investigate the predictions of a mathematical model for an impact damper consisting of a pendulum and an elastic barrier. Our model incorporates Hertzian contact between the spherical steel pendulum and the barrier. In next step, due to the strong non-linearity of the model, Homotopy Perturbation and iteration perturbation are used to solve the dynamics equation. Homotopy and iteration perturbation method provide analytical solution for strong non-linear equation. To confirm the accuracy of this method, results are compared with numerical solutions in SimMechanics toolbox of MATLAB. Next, a systematic approach based on a Genetic Algorithm optimization method is used to determine the best design parameters for suppressing vibrations. Finally, optimum parameters for complete quenching of vibrations are obtained.
Keywords:
Impact Damper, Homotopy Perturbation, Hertzian Contact, Genetic Algorithm
1. Introduction
Mechanical systems whose elements impact on another during operation have been extensively investigated by researchers. The reason for this interest lies in the fact that impacts occur very often in many modern technical devices. When the displacement of the primary system exceeds the clearance, the impact mass collides with the container wall companying with energy dissipation and momentum exchange. Sometimes, energy dissipation is helpful in attenuating the excessive vibration amplitudes of the primary structure.In the past few years, behavior of impact dampers has been investigated experimentally, analytically and numerically[1-4]. Son et al.[5] proposed active momentum exchange impact dampers to suppress the first large peak value of the acceleration response due to a shock load. Bapat and Sankar[6] showed that the coefficient of restitution has a great effect on the performance of impact dampers. They demonstrated that in the case of single unit impact dampers, optimized parameters at resonance are not necessarilyoptimal at other frequencies. Cheng and Xu[7] obtained a relation between coefficient of restitution and impact damping ratio. They showed that optimal initial displacement is a monotonically increasing function of damping. The main target of the present investigation is to analyze the system with two degree of freedom, which can operate as an impact damper of vibrations[8-9]. This paper investigates the prediction of mathematical model for a system consisting of a pendulum and an elastic barrier. This model incorporates Hertzian contact between the spherical steel pendulum and the elastic barrier[10-11].The mathematical equation of motion is solved analytically using homotopy perturbation, which is a new method for solving strongly nonlinear equations[12-14]. Moreover, a numerical model of the mentioned system is developed using MATLAB and it verifies by comparing its results with the analytical solution of the mathematical equation. It is shown that both of results are pretty close to each other so, it is concluded that the model is reliable and can be used for investigating applications of the impact damper changing its properties.Using the discussed model for the presented vibro impact systems, effects of changing the design parameters of the impact damper is investigated. Finally, the optimum values for the design parameters of the impact damper system are obtained. It should be noted that there are alot of considerations toward the non-gradient based optimization algorithms. The reason for this interest lies in the fact that, these algorithms:• can easily be used in computer programs.• have global properties.• do not require gradient information• can be tuned for each problem.•…Optimizing the structural and operational design of buildings, factories, machines, etc. is a rapidly expanding application of Genetic Algorithms (GAs). These are being created for such uses as optimizing the design of heat exchangers, robot gripping arms, satellite booms, building trusses, flywheels, turbines, and just about any other computer-assisted engineering design application[15-17].For finding the best design of the impact damper system, the GA optimization method is used. Finally, optimum parameters of the impact damper system for strongly vibration suppressing are obtained.
2. Mathematical Modeling
A model for an impact damper consisting of a pendulum and an elastic barrier is schematically shown in Fig. (1). As shown in this figure, the pendulum encounters the barrier in angular position Xc.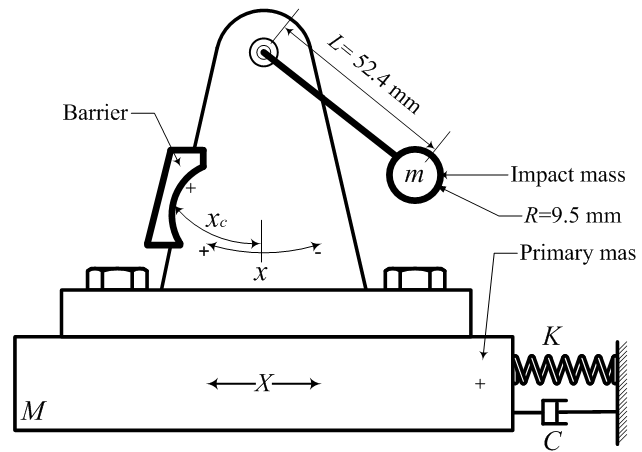 | Figure 1. Schematic drawing of the impact damper |
The governing equation of pendulum motion can be obtained using Lagrange’s equation. Kinetic energy for the pendulum, which is forced at an excitation frequency Ω and amplitude A, is | (1) |
For the discussed pendulum, the potential energy can be formulated as follows: | (2) |
In the present study, the contact between spherical steel pendulum and the elastic barrier is described using the Hertzian contact model. The Hertzian contact force is as follows: | (3) |
where E is the elastic modulus of the barrier and R is the radius of the sphere that impacts the barrier. The elastic damping force is given by: | (4) |
where µ is the coefficient of barrier damping. Substituting Eq.(1) and Eq.(2) into the Lagrange’s equation yields: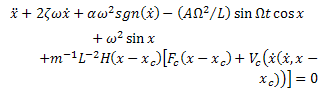 | (5) |
where  is the magnitude of the coulomb damping,
is the magnitude of the coulomb damping,  is the damping ratio and H is Heaviside step function. Sign function in Eq.(5) can be estimated by the
is the damping ratio and H is Heaviside step function. Sign function in Eq.(5) can be estimated by the . In other words:
. In other words: | (6) |
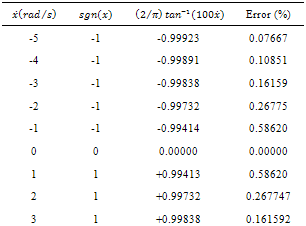
Table (1) shows error of using the above approximation. As shown in this table, using the above relation provides accurate estimation. Regarding to Eq. (6), the simplified form of Eq.(5) can be written as follows: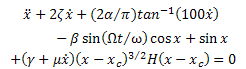 | (7) |
In the above relation, β and γ are defined by: (8)
(8)Table 1. Error of using Eq. (7) instead of sign equation
 |
| |
|
3. Investigating Oscillation of the Impact Mass
In this section, oscillation of the impact mass is investigated using the homotopy perturbation method. In doing so, assume the external and damping forces are negligible (ζ=α=μ=β=0). Therefore, Eq. (7) can be rewritten as: | (9) |
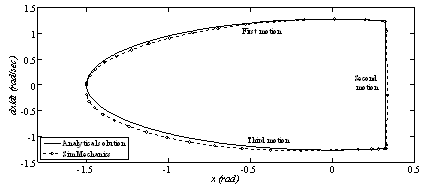 | Figure 2. Phase plane of the pendulum motions |
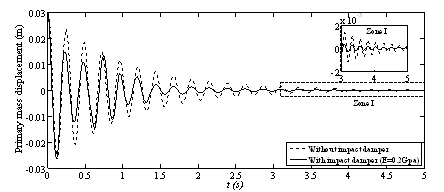 | Figure 3. Effect of using impact damper on the main mass oscillation |
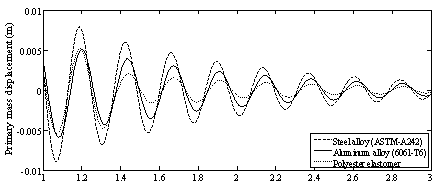 | Figure 4. Oscillation of the main mass with different barriers |
Therefore, the dynamic behavior of the discussed vibro-impact system can be formulated using the following relations: | (10) |
As presented in the above relation, pendulum motions can be divided into the following motions: (1) no contact and forward motion ( )(2) contact (
)(2) contact ( ) (3) no contact and backward motion (
) (3) no contact and backward motion ( )In the first and third motion, the sine function in Eq.(10) can be simply estimated with two first terms of Taylor series. In case of the second motion, the sine function is only replaced with first term of Taylor series. Therefore, Eq.(10) for the first and third motions can be rewritten as follows:
)In the first and third motion, the sine function in Eq.(10) can be simply estimated with two first terms of Taylor series. In case of the second motion, the sine function is only replaced with first term of Taylor series. Therefore, Eq.(10) for the first and third motions can be rewritten as follows: | (11) |
Circular natural frequency of the above relation can be calculated using the homotopy perturbation. It is shown as follows: (12)Therefore, the first harmonic motion of the pendulum when A=1.5 rad, can be formulated as follows:
(12)Therefore, the first harmonic motion of the pendulum when A=1.5 rad, can be formulated as follows: (13)At the present study, consider
(13)At the present study, consider . At the contact point, the pendulum velocity is equal to 1.2419 rad/sec. Therefore, the differential equation of the second motion can be written as follows:
. At the contact point, the pendulum velocity is equal to 1.2419 rad/sec. Therefore, the differential equation of the second motion can be written as follows: | (14) |
Deformation of barrier (when contact occurs) is considered small. Therefore, the nonlinear term of the above equation can be approximated with a linear term. The linear term may be calculated using the least square method. Therefore, Eq.(14) changes to:  | (15) |
The above linear ordinary differential equation can be easily solved. The time interval between two consecutive contact points ( ) in the second motion is equal to contact duration. In the present study, the contact duration is equal to 9.258×10-8 s. Afterward, the third motion will be investigated. The third motion is similar to the first motion, but its direction is opposite with respect to the first motion. Therefore, the third harmonic motion of the pendulum can be formulated as:
) in the second motion is equal to contact duration. In the present study, the contact duration is equal to 9.258×10-8 s. Afterward, the third motion will be investigated. The third motion is similar to the first motion, but its direction is opposite with respect to the first motion. Therefore, the third harmonic motion of the pendulum can be formulated as: | (16) |
Fig. (3) shows the phase-plane diagram of the pendulum motion. In this figure, the presented analytical solution is compared with the numerical solution, which is obtained using the model simulated in SimMechnics tool box of MATLAB software. Results of using numerical method and analytical method are precisely close to each other. As a result, it can be concluded that the presented method can precisely describe the vibro-impact system.
4. Investigating Effects of Barrier Material
In this section, application of impact damper system is investigated with varying the barrier properties. In doing so, steel alloy, aluminum alloy and polyester elastomer are selected as the barriers material. Elastic modulus these materials are listed in Table (2). Table 2. Elastic modulus of the barrier materials
 |
| |
|
Effect of using the impact damper system in free vibrations of the primary mass is shown in Fig. (3). As shown in this figure, the impact damper system can effectively suppress vibration of the primary mass.Fig. (4) shows the oscillation of primary mass with impact damper, which is equipped with the presented barriers in Table (2) in time domain 1 to 2.5 seconds. It is shown that impact dampers can absorb oscillation faster than others can, if their barrier are less stiff.
5. Optimizing Main Parameters of the Impact Damper Using Genetic Algorithm
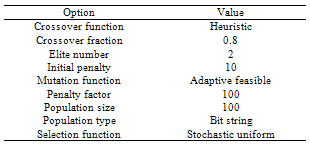
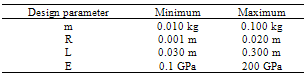
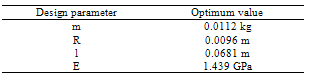
Genetic Algorithms are computerized search and optimization methods that work very similar to the principles of natural evolution. GA’s are attractive in engineering design and applications because they are easy to use and they are likely to find the globally best design or solution, which is superior to any other design or solution.In order to find the best design parameters of the impact damper system, values of R, L, m and E are considered as the design parameters. Genetic Algorithm (GA) is used to optimize the design parameters. Table (3) shows the specifications of the used GA method. Maximum and minimum limits of design parameters are shown in Table 4. Fitness function is considered as the rest time. After approaching to the rest time vibration amplitude is less than 10% of initial excitation amplitude. The optimization algorithm is designed to find optimum design parameters, which minimizes the fitness value. After performing GA method for 51 generation, average change in the fitness value becomes small that show the method converges. The optimum values of design parameters are shown in Table (5).In the presented study the death-type penalty is selected. If a feasible search space is a reasonable part of the whole search space, it can be expected that this method works well[18]. In the presented study, the penalty factor is selected as 100. Furthermore, to find the optimum design parameters, the algorithm is run 100 times. Table 3. Genetic algorithm specifications
 |
| |
|
Table 4. Design parameters’ limits
 |
| |
|
Table 5. Optimum design parameters
 |
| |
|
6. Conclusions
This paper studies the application of an impact damper for suppressing undesired vibration of an oscillator. In this investigation, the impact is modelled using Hertzian contact. The governing equations of motion of the vibratory system are solved analytically and numerically. It is shown, the analytical solution, which is obtained using the homtopy perturbation method is completely close to numerical solution. Effects of changing the design parameters of the impact damper are investigated on the application of such systems. Moreover, the optimum parameters for complete quenching of vibrations are achieved by employing a Genetic Algorithm optimization method. While investigating the effects of elastic coefficient of barrier, it observes that lower values of the elastic coefficients are resulted in better application of the impact damper for absorb the undesired oscillations.
References
| [1] | Cheng, C.C., Wang, J.Y., Free vibration analysis of a resilient impact damper. International Journal of Mechanical Sciences, 2003. 45(4): p. 589-604. |
| [2] | Ibrahim, R.A., Vibro-impact dynamics : modeling, mapping and applications. Lecture notes in applied and computational mechanics,. 2009, Berlin: Springer Verlag. xi, 297 p. |
| [3] | Popplewell, N. and M. Liao, A simple design pro-cedure for optimum impact dampers. Journal of Sound and Vibration, 1991. 146(3): p. 519-526. |
| [4] | Zinjade, P.B. and A.K. Mallik, Impact damper for controlling friction-driven oscillations. Journal of Sound and Vibration, 2007. 306(1-2): p. 238-251. |
| [5] | Son, L., et al., Experiment of Shock Vibration Con-trol Using Active Momentum Exchange Impact Damper. Journal of Vibration and Control, 2010. 16(1): p. 49-64. |
| [6] | Bapat, C.N. and S. Sankar, Single unit impact dam-per in free and forced vibration. Journal of Sound and Vibration, 1985. 99(1): p. 85-94. |
| [7] | Cheng, J. and H. Xu, Inner mass impact damper for attenuating structure vibration. International Journal of Solids and Structures, 2006. 43(17): p. 5355-5369. |
| [8] | Bayly, P.V., On the Spectral Signature of Weakly Bilinear Oscillators. Journal of Vibration and Acoustics, 1996. 118(3): p. 352-361. |
| [9] | Bayly, P.V. and L.N. Virgin, An Experimental Study of an Impacting Pendulum. Journal of Sound and Vibration, 1993. 164(2): p. 364-374. |
| [10] | Chicone, C., K. Felts, and B. Mann, Observation and investigation of a non-monotonic period function for an impact oscillator. Communications in Nonlinear Science and Numerical Simulation, 2009. 14(5): p. 2415-2425. |
| [11] | Mann, B.P., Carter, R.E. & Hazra, S.S., Experimental study of an impact oscillator with viscoelastic and Hertzian contact. Nonlinear Dynamics, 2007. 50(3). |
| [12] | Farshidianfar, A., Nickmehr, N., Some new analyti-cal techniques for duffing oscillator with very strong nonlinearity. Iranian Journal of Mechanical Engineering, 2008. 10(1): p. 37-54. |
| [13] | He, J.-H., Perturbation methods : basic and beyond. 2006, Boston: Elsevier. |
| [14] | He, J.H., Some Asymptotic Methods for Strongly Nonlinear Equations. International Journal of Modern Physics B, 2006. 20(10): p. 1141-1199. |
| [15] | James, T.L., R. Barkhi, and J.D. Johnson, Platform impact on performance of parallel genetic algorithms: Design and implementation considerations. Engineering Applications of Artificial Intelligence, 2006. 19(8): p. 843-856. |
| [16] | Renner, G. and A. Ekárt, Genetic algorithms in computer aided design. Computer-Aided Design, 2003. 35(8): p. 709-726. |
| [17] | Mayer, M.K., A network parallel genetic algorithm for the one machine sequencing problem. Computers & Mathematics with Applications, 1999. 37(3): p. 71-78. |
| [18] | Michalewicz, Z., et al., Evolutionary algorithms for constrained engineering problems. Computers & Industrial Engineering, 1996. 30(4): p. 851-870. |
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-Text HTML
Full-Text HTML