-
Paper Information
- Next Paper
- Previous Paper
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
Advances in Computing
p-ISSN: 2163-2944 e-ISSN: 2163-2979
2012; 2(1): 12-16
doi: 10.5923/j.ac.20120201.03
Image Denoising Using Non Linear Diffusion Tensors
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-Text HTML
Full-Text HTMLFaouzi Benzarti , Hamid Amiri
Signal, Image and Patterns Recognition Laboratory Engineering School of Tunis (ENIT), Tunisia
Correspondence to: Faouzi Benzarti , Signal, Image and Patterns Recognition Laboratory Engineering School of Tunis (ENIT), Tunisia.
| Email: |  |
Copyright © 2012 Scientific & Academic Publishing. All Rights Reserved.
Image denoising is an important pre-processing step for many image analysis and computer vision system. It refers to the task of recovering a good estimate of the true image from a degraded observation without altering and changing useful structure in the image such as discontinuities and edges. In this paper, we propose a new approach for image denoising based on the combination of two non linear diffusion tensors. One allows diffusion along the orientation of greatest coherence while the other allows diffusion along orthogonal directions. The idea is to track perfectly the local geometry of the degraded image and applying anisotropic diffusion mainly along the preferred structure direction. To illustrate the effective performance of our method, we present some experimental results on a test and real photographic color images.
Keywords: Image denoising, PDEs, Structure Tensor, Diffusion Tensor
Cite this paper: Faouzi Benzarti , Hamid Amiri , "Image Denoising Using Non Linear Diffusion Tensors", Advances in Computing, Vol. 2 No. 1, 2012, pp. 12-16. doi: 10.5923/j.ac.20120201.03.
Article Outline
1. Introduction
- Image denoising has been one of the most important and widely studied problems in image processing and computer vision. The need to have a very good image quality is increasingly required with the advent of the new technologies in various areas such as multimedia, medical image analysis, aerospace, video systems and others. Indeed, the acquired image is often marred by noise which may have a multiple origins such as: thermal fluctuations; quantify effects and properties of communication channels. It affects the perceptual quality of the image, decreasing not only the appreciation of the image, but also the performance of the task for which the image has been intended. The challenge is to design methods, which can selectively smooth a degraded image without altering edges, losing significant features and producing reliable results. Traditionally, linear models have been commonly used to reduce noise. It is shown that these methods perform well in the flat regions of images, but do not preserve edges and discontinuities which are often smeared out. In contrast, nonlinear models can handle edges in a much better way than those linear models. Many approaches have been proposed to remove the noise effectively while preserving the original image details and features as much as possible. In the past few years, the use of non linear PDEs methods involving anisotropic diffusion has significantly grown and becomes an important tool in contemporary image processing. The key idea behind the anisotropic diffusion is to incorporate an adaptivity smoothness constraint in the denoising process. That is, the smooth is encouraged in a homogeneous region and discourage across boundaries, in order to preserve the natural edge of the image. One of the most successful tools for image denoising is the Total Variation (TV) model[8-10] and the anisotropic smoothing model[1] which has since been expanded and improved upon[3,5,20]. Over the years, other very interesting denoising methods have been emerged such as: Bilateral filter and its derivatives[6,11, 12]. In our work, we address image denoising problem by using the so-called structure tensors[14] which have proven their effectiveness in several areas such as: texture segmentation[17], motion analysis[18] and corner detection [16,19,21]. The structure tensor provides a more powerful description of local pattern images better than a simple gradient. Based on its eigenvalues and the corresponding eigenvectors, the tensor summarizes the predominant directions of the gradient in a specified neighborhood of a point and the degree to which those directions are coherent. Our contribution in this work lies in the use of two coupled diffusion tensors which allow a complete and coherence regularization process which significantly improves the quality image. This paper is organized as follows. In Section 2, we introduce the non linear diffusion PDEs and discuss the various options that have been implemented for the anisotropic diffusion. In Section 3, we present the non linear diffusion tensor formalism and its mathematical concept. Section 4 focuses on our proposed denoising approach. Numerical experiments and results on test and real photographic images are shown in Section 5.
2. Non Linear Diffusion PDE: Overview
- In this section, we review some basic mathematical concepts of the nonlinear diffusion PDEs proposed by Perona and Malik[1]. Let
 be the grayscaled intensity image with a diffusion time t, for the image domain
be the grayscaled intensity image with a diffusion time t, for the image domain .The nonlinear PDE equation is given by:
.The nonlinear PDE equation is given by: | (1) |
 denotes the first derivative regarding the diffusion time t;
denotes the first derivative regarding the diffusion time t;  denotes the gradient modulus and g(.) is a non-increasing function, known as the diffusivity function which allows isotropic diffusion in flat regions and no diffusion near edges.By developing the divergence term of (1), we obtain:
denotes the gradient modulus and g(.) is a non-increasing function, known as the diffusivity function which allows isotropic diffusion in flat regions and no diffusion near edges.By developing the divergence term of (1), we obtain: | (2) |
 and
and  are respectively the second spatial derivatives of in the directions of the gradient
are respectively the second spatial derivatives of in the directions of the gradient , and its orthogonal
, and its orthogonal  ; H denotes the Hessian of u. According to these definitions, on the image discontinuities, we have the diffusion along (normal to the edge) weighted with
; H denotes the Hessian of u. According to these definitions, on the image discontinuities, we have the diffusion along (normal to the edge) weighted with  and a diffusion along
and a diffusion along  (tangential to the edge) weighted with
(tangential to the edge) weighted with . To understand the principle of the anisotropic diffusion, let represent a contour C (figure 1) separating two homogeneous regions of the image, the isophote lines (e.g. level curves of equal gray-levels) correspond to u(x,y) = c. In this case, the vector is normal to the contour C, the set is then a moving orthonormal basis whose configuration depends on the current coordinate point (x, y). In the neighborhood of a contour C, the image presents a strong gradient. To better preserve these discontinuities, it is preferable to diffuse only in the direction parallel to C (i.e. in the -direction). In this case, we have to inhibit the coefficient of
. To understand the principle of the anisotropic diffusion, let represent a contour C (figure 1) separating two homogeneous regions of the image, the isophote lines (e.g. level curves of equal gray-levels) correspond to u(x,y) = c. In this case, the vector is normal to the contour C, the set is then a moving orthonormal basis whose configuration depends on the current coordinate point (x, y). In the neighborhood of a contour C, the image presents a strong gradient. To better preserve these discontinuities, it is preferable to diffuse only in the direction parallel to C (i.e. in the -direction). In this case, we have to inhibit the coefficient of  (e.g.
(e.g.  ), and to suppose that the coefficient of
), and to suppose that the coefficient of  does not vanish.
does not vanish.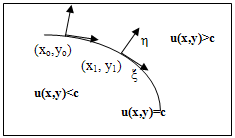 | Figure 1. Image contour and its moving orthonormal basis  |
 :avoids inverse diffusion
:avoids inverse diffusion :allows isotropic diffusion for low gradient.allows anisotropic diffusion to preserve discontinuities for the high gradient.An extension of the nonlinear diffusion filtering to vector-valued image (e.g. color image) has been proposed [20][3]. It evolves:
:allows isotropic diffusion for low gradient.allows anisotropic diffusion to preserve discontinuities for the high gradient.An extension of the nonlinear diffusion filtering to vector-valued image (e.g. color image) has been proposed [20][3]. It evolves:  under the diffusion equations:Where
under the diffusion equations:Where : denotes the ith component channels of
: denotes the ith component channels of  Note that
Note that , represents the luminance function, which coupled all vectors channels taking the strong correlations among channels. However, this luminance function is not being able to detect iso-luminance contours.
, represents the luminance function, which coupled all vectors channels taking the strong correlations among channels. However, this luminance function is not being able to detect iso-luminance contours. 3. Non Linear Diffusion Tensor
- The non linear diffusion PDE saw previously does not give reliable information in the presence of flow-like structures (e.g. fingerprints). It would be desirable to rotate the flow towards the orientation of interesting features. This can be easily achieved by using the structure tensor, also referred to the second moment matrix. For a multivalued image, the structure tensor has the following form:
 | (4) |
 : the smoothed version of the gradient which is obtained by a convolution with a Gaussian kernel
: the smoothed version of the gradient which is obtained by a convolution with a Gaussian kernel . The structure scale
. The structure scale  determines the size of the resulting flow-like patterns. Increasing
determines the size of the resulting flow-like patterns. Increasing  gives an increased distance between the resulting flow lines.These new gradient features allow a more precise description of the local gradient characteristics. However, it is more convenient to use a smoothed version of
gives an increased distance between the resulting flow lines.These new gradient features allow a more precise description of the local gradient characteristics. However, it is more convenient to use a smoothed version of , that is:
, that is:  | (5) |
 : a Gaussian kernel with standard deviation
: a Gaussian kernel with standard deviation .The integration scale
.The integration scale  averages orientation information. Therefore, it helps to stabilize the directional behavior of the filter. In particular, it is possible to close interrupted lines if
averages orientation information. Therefore, it helps to stabilize the directional behavior of the filter. In particular, it is possible to close interrupted lines if  is equal or larger than the gap size. In order to enhance coherent structures, the integration scale
is equal or larger than the gap size. In order to enhance coherent structures, the integration scale  should be larger than the structure scale
should be larger than the structure scale  (
( . In summary, the convolution with the Gaussian kernels
. In summary, the convolution with the Gaussian kernels ,make the structure tensor measure more coherent. To go further into the formalism, the structure tensor
,make the structure tensor measure more coherent. To go further into the formalism, the structure tensor  can be written over its eigenvalues (
can be written over its eigenvalues ( )and eigenvectors(
)and eigenvectors( ), that is:
), that is: | (6) |
 give the preferred local orientations, and the corresponding eigenvalues denote the local contrast along these directions. The eigenvalues of
give the preferred local orientations, and the corresponding eigenvalues denote the local contrast along these directions. The eigenvalues of  are given by :
are given by : | (7) |
 | (8) |
 satisfy :
satisfy : | (9) |
 .The eigenvector
.The eigenvector which is associated with the larger eigenvalue
which is associated with the larger eigenvalue  defines the direction of largest spatial change (i.e. the “gradient” direction). There are several ways to express the norm of the vector gradient to detect edges and corners; the most used is
defines the direction of largest spatial change (i.e. the “gradient” direction). There are several ways to express the norm of the vector gradient to detect edges and corners; the most used is  .The eigenvalues
.The eigenvalues  are indeed well adapted to discriminate different geometric cases:If
are indeed well adapted to discriminate different geometric cases:If  , the region doesn't contain any edges or corners. For this configuration, the variation norm
, the region doesn't contain any edges or corners. For this configuration, the variation norm  should be low.If
should be low.If , there are a lot of vector variations. The current point may be located on a vector edge. For this configuration, the variation norm
, there are a lot of vector variations. The current point may be located on a vector edge. For this configuration, the variation norm  should be high.If
should be high.If , there is a saddle point of the vector surface, which can possibly be a vector corner in the image In this case
, there is a saddle point of the vector surface, which can possibly be a vector corner in the image In this case  should be even higher than the case above. We note that for the case of the scalar image (e.g. n=1),
should be even higher than the case above. We note that for the case of the scalar image (e.g. n=1),  and
and  Moreover, Weickert [3] proposed a non linear diffusion tensor by replacing the diffusivity function g(.) in (1) with a structure tensor, to create a truly anisotropic scheme, that is:
Moreover, Weickert [3] proposed a non linear diffusion tensor by replacing the diffusivity function g(.) in (1) with a structure tensor, to create a truly anisotropic scheme, that is: | (10) |
 is the diffusion tensor which is positive definite symmetric 2x2 matrix. This tensor possesses the same eigenvectors
is the diffusion tensor which is positive definite symmetric 2x2 matrix. This tensor possesses the same eigenvectors as the structure tensor
as the structure tensor  and uses λ1 and λ2 to control the diffusion speeds in these two directions, that is:
and uses λ1 and λ2 to control the diffusion speeds in these two directions, that is:  | (11) |
 ; where Id : Identity matrix.
; where Id : Identity matrix.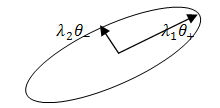 | Figure 2. Diffusion tensor 2D representation |
 (12)Where
(12)Where  and
and .In flat regions, we should have
.In flat regions, we should have  and then
and then  where Id is the identity matrix. The tensor D is defined to be isotropic in these regions and takes the form of a circle of radius
where Id is the identity matrix. The tensor D is defined to be isotropic in these regions and takes the form of a circle of radius .Along image contours, we have
.Along image contours, we have , and then
, and then  . The diffusion tensor D is then anisotropic, mainly directed by the smoothed direction of the image isophotes.The idea from the CED approach is that broken boundries of a single structure could be reconnected by allowing diffusion along the orientation of greatest coherence
. The diffusion tensor D is then anisotropic, mainly directed by the smoothed direction of the image isophotes.The idea from the CED approach is that broken boundries of a single structure could be reconnected by allowing diffusion along the orientation of greatest coherence4. Proposed Method
- Our idea is to combine two types of tensors: one allows diffusion along the orientation of greatest coherence, while the other allows diffusion along orthogonal directions. It is viewed as a regularization process. The proposed equation is as follows:The parameter
 can be viewed as a parameter of regularization which ensures the compromise between the two tensors. The tensor
can be viewed as a parameter of regularization which ensures the compromise between the two tensors. The tensor  is derived from (11), that is
is derived from (11), that is  =
=  with the following diffusion weight functions:
with the following diffusion weight functions:  | (13) |
 . For a scalar image, the tensor D2 takes the form:
. For a scalar image, the tensor D2 takes the form:  | (14) |
 : denote the local coordinate system which are the smoothed version of
: denote the local coordinate system which are the smoothed version of ; with:
; with:  | (15) |
 : denotes a Gaussian Kernel; and
: denotes a Gaussian Kernel; and .By developing (14), the tensor D2 can be expressed by:Where
.By developing (14), the tensor D2 can be expressed by:Where  : denote the conductivity in the direction of the gradient and along the isophotes respectively. There are several choices for these conductivities, the wise choice is:
: denote the conductivity in the direction of the gradient and along the isophotes respectively. There are several choices for these conductivities, the wise choice is: and
and  , with
, with  . This allows preserving and enhancing edges while smoothing within flat regions. Indeed, when the gradient modulus
. This allows preserving and enhancing edges while smoothing within flat regions. Indeed, when the gradient modulus  is high (e.g. edges, corners region), both
is high (e.g. edges, corners region), both  tends to 0, inhibiting the effect of diffusion. In contrast, when
tends to 0, inhibiting the effect of diffusion. In contrast, when  is low (e.g. flat region),
is low (e.g. flat region),  tends to two constants: 1 and
tends to two constants: 1 and  respectively, the diffusion is isotropic in (
respectively, the diffusion is isotropic in ( )directions. The extension of (16) to multivalued (e.g. color) images require the integration of the spectral components, that is:
)directions. The extension of (16) to multivalued (e.g. color) images require the integration of the spectral components, that is:  | (17) |
 Furthermore, equation (12) can be solved numerically using finite differences [2]. The time derivative
Furthermore, equation (12) can be solved numerically using finite differences [2]. The time derivative  is approximated by the forward difference
is approximated by the forward difference , which leads to the iterative scheme:
, which leads to the iterative scheme:  | (18) |
 | (19) |
 the tensor term (i.e. D1, D2), And
the tensor term (i.e. D1, D2), And : the central differences of any F functions.The main steps of the algorithm are:The algorithm has been implemented with Matlab language. In the following section, we will give some experimental results.
: the central differences of any F functions.The main steps of the algorithm are:The algorithm has been implemented with Matlab language. In the following section, we will give some experimental results. 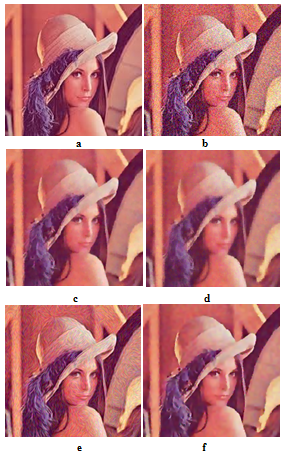 | Figure 3. Comparison results;-a- Original image,-b- Degraded image,-c- Total Variation (TV) method,-d- Bilateral Filter (BF) method,-e- CED method,-f- Proposed method |
5. Experimental Results
- We test the performance of the proposed algorithm with the famous “Lena” image sized 256x256 pixels figure 3-(a). A white gaussian noise with SNR=7.27 dB is added to the original image to obtain the noisy version showed in figure 3(b).The model’s parameters are fixed to: N = 10,
 . The restored image in figure 3-f shows a significantly improvement, edges and discontinuities have been recovered and preserved with a good suppression of noise. Compared to the other methods, we note that the TV one (figure 3(c)) has similar performance.Nevertheless, our method seems to better preserve and enhance discontinuities. The CED method (figure 3(e)) is efficient preserving details, but introduces artifacts and streamlines in flat regions. The BF method is efficient removing noise, but loses details. To evaluate and quantify the quality image, we use two measures: the classic peak signal-to-noise-ratio (PSNR) and the mean structural similarity (MSSIM) index [15], which compares the structure of two images after subtracting luminance, and normalizing variance. The MSSIM approximates the perceived visual quality of an image better than PSNR. It takes values in [0,1] and increases as the quality increases. Table 1 confirms the effectiveness of our model with the highest score of MSSIM.
. The restored image in figure 3-f shows a significantly improvement, edges and discontinuities have been recovered and preserved with a good suppression of noise. Compared to the other methods, we note that the TV one (figure 3(c)) has similar performance.Nevertheless, our method seems to better preserve and enhance discontinuities. The CED method (figure 3(e)) is efficient preserving details, but introduces artifacts and streamlines in flat regions. The BF method is efficient removing noise, but loses details. To evaluate and quantify the quality image, we use two measures: the classic peak signal-to-noise-ratio (PSNR) and the mean structural similarity (MSSIM) index [15], which compares the structure of two images after subtracting luminance, and normalizing variance. The MSSIM approximates the perceived visual quality of an image better than PSNR. It takes values in [0,1] and increases as the quality increases. Table 1 confirms the effectiveness of our model with the highest score of MSSIM.
|
 | Figure 4. Results on a real photographic image, -a- Original image, -b- Restored image |
6. Conclusions
- In this paper, we have proposed a new approach for image denoising based on the diffusion tensors. The idea is to combine two types of tensors: one allows diffusion along the orientation of greatest coherence, while the other allows diffusion along orthogonal directions. This is offering a flexible and effective control on the diffusion process. Experimental results on test and real digital pictures are very promising and provide very good quality images in terms of noise reduction and discontinuities preservation. Future work will include automatic parameters estimation and computational models that can automatically predict perceptual image quality.